

こんにちは、しおたにです。
前回までで一通り設計(吸引回りを除く)が終わったのでこれまでどうやって設計をしてきたかを解説しようと思います。
今回は設計を基本的な流れについてです。
「Fusion360で設計するマイクロマウス」と題してはいますが、今回Fusion360はほとんど出てきません。
3DCADはあくまで設計のための道具であり、一連の設計作業のなかで使うものなので、まずは設計の流れを先に述べてからとしたいと思います。
設計について自分が学んだ際に読んだ本を先に紹介しておきます。
設計の流れ
私は設計のことを
何かの課題や問題があったときにその答えを出すまでのプロセスのことと捉えています。
課題や問題を整理し、何をもって正解とするかを決め、その正解を導き出すためにいろいろなアイデアを盛り込んでいきます。
アイデアを具現化するために作り方を決め、その過程で寸法や形状・構造を決めていきます。
設計の流れを図にするとこのような感じになります。
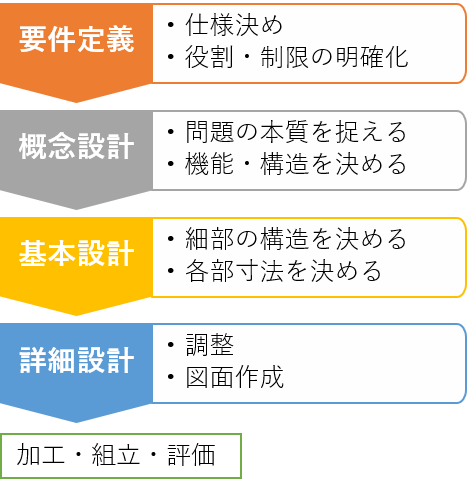
要件定義
ここでは解決したい課題を整理し、何を達成すればよいか、制約は何かといったことを洗い出していきます。
一般的な製品開発においては、設計するものがどういう役割をもつか考えます。適切な課題を発見するためにマーケティングなども重要です。
今回はクラシックマウスに出場するというのが大前提になりますので、競技規定という形で課題とその制約がまとめられています。
また、ロボット競技会においては、目標タイムやチャレンジしたい技術などといった点がここに当てはまります。
今回でいえば、
- 2019年全国大会の迷路を6秒以内にゴールする
です。
このほか予算上限や加工設備、作業時間の制約などもまとめ、言うならば設計の”幅”を規定します。
ここで定義したことは後々の判断基準になります。迷ったことがあればここに立ち返って何を優先すべきかを考えてみるとブレなく開発を進めることが出来ます。
概念設計
概念設計によって要件定義という情報の列挙を具体的な「設計解」に変えていきます。個人的にはこの概念設計こそ設計の肝であると考えています。
課題の本質を見つける
ここでは課題を一度抽象化してみます。
要はこの機械はなにをするものかを簡潔にまとめてみます。
言い換えれば、それさえできればどんな構造でもいいわけです。なんなら機械である必要すらないかもしれません(そこで終わってしまいますが)。
ここで一度先入観を無くし、課題の本質を見つけることで、従来の答えとは別の革新的なものが出来上がるかもしれません。頭を柔らかくすることが大事だと思います。
今回でいえば、
- 2019年全国大会の迷路の中を移動し6秒以内にゴールするなにか
を作ればよいということになります。
その17はこの段階でした。
機能・構造を決める
次にこの課題を達成するにはどういう機能が必要か、どういう構造にしていくかを決めます。
アイデア出しと呼ばれるような工程はここにあたります。
ここでは複数の案が出てくるはずですので、何を採用するかを基準をきめたり比較したりして選別します。
例えば移動方法のアイデアがこれくらい出たとします。
- ドローンみたく飛んで直接ゴールに行く
- タイヤで走る
- クローラで走る
ここで出てくるのが先ほど定義した要件たちです。
競技規定によれば迷路は飛び越してはいけないので「1.ドローンみたく飛んで直接ゴールに行く」は却下です。
クローラはタイヤと比較して機構が複雑で効率も悪いですが悪路走行は得意です。しかし、迷路の段差は1[mm]程度しかないためこの利点は生かせません。「3.クローラで走る」も却下です。
このようにして制約内に収まるか、どうやって加工するか、作り出すことは可能かなどを考えます。実際に試作してみて比べるのもアリです。
また、3DCADを利用してモデルをつくり、干渉や構造的にどこが弱そうかなども洗い出すことが出来ます。下の画像は以前紹介した軸周りの構造の比較です。


達成すべき点をまとめる
考えた機能や構造がどういう点を満たしていれば課題解決につながるかをまとめておきます。
今回でいえば、タイヤで走行することは決まったので、
- 必要な速度とタイヤのサイズからどれくらいの速さで回せればよいか
- 必要な加減速度を得るにはどういう性能のモータが必要か
- ギア比はどれくらいが適切か
などです。
その25、その26、その27、その28、その31がここにあたります。
今回は
この工程は機構やパーツを選ぶために行うので、これらを先に決めた場合この部分はだいぶ省略されることになります。
なぜ先にパーツ類を決められたかというと、「2019年全国大会の迷路を6秒以内にゴールする」をすでに達成している先行例(上位陣のロボットたち)を参考にしたからです。
ロボット競技会においては、”最適解”というものがある程度決まっていることもあります。先人たちによる試行錯誤の末たどり着いたものですからこれを利用できれば開発期間を短縮できます。
今回はこの目標を達成するために先人たちの知恵をお借りしたわけですね。
これが「全く新しいオリジナルロボットでゴールする」とかだったら全く違っていたかもしれませんね。
基本設計
ここでようやく細部の構造を考えます。実際に寸法を入れるのもここです。
この段階でようやく3DCADが主役になります。
ここで不都合が出てきた場合は前段階にもどって考え直します。
壊れやすそうだからリブを入れたり、熱膨張を考えて削る場所を決めたり、加工誤差を考慮して大きめの穴をあけたりするのもここになります。

詳細設計
加工のための図面作成や細部の調整を行います。
Gコードを作成したりします。
こちらの内容は後々まとめる予定です。
長くなってしまいましたが、今回はここまで。
次回から基本設計においてFusion360をどう駆使していくかをご紹介したいと思います。