 Pi:Co V2 体験記
Pi:Co V2 体験記 Pi:Co V2体験記第2シーズンその2「超信地旋回で速度と加速度を可変にする!」
また夏がやってくる こんにちは、広報DTP担当のサナエです。 このブログは技術畑ではない広報がアールティのPi:Co V2と1シーズンともに頑張って、もうちょっと一緒に頑張りつつ魅力をアピールしたい体験記第2シーズンです。 前回Pi:Co ...
 Pi:Co V2 体験記
Pi:Co V2 体験記 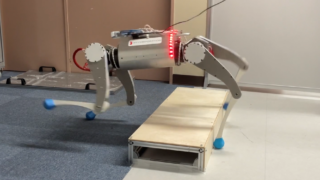 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  目指せ全日本大会完走 - Yoのマイクロマウス研修
目指せ全日本大会完走 - Yoのマイクロマウス研修  Pi:Co V2 体験記
Pi:Co V2 体験記 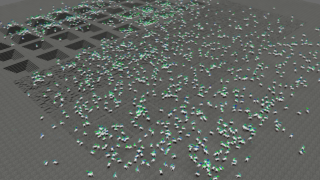 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作 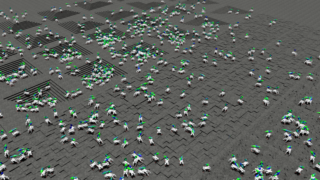 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  目指せ全日本大会完走 - Yoのマイクロマウス研修
目指せ全日本大会完走 - Yoのマイクロマウス研修  4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  Pi:Co V2 体験記
Pi:Co V2 体験記  技術情報・開発日誌
技術情報・開発日誌