 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) モータの運転と回転数の取得(FAULHABER1717+DRV8835) ? 100日後に完走するマウス【98日目】 Part.5
はじめにどうも、倉澤ズズくんです。前回は足周りを設計しました。これを駆動するためにモータを回して、回転数が得られることを確認します。マイクロマウスに搭載するユニット毎(足周り部、距離測定センサ部、ジャイロセンサ部)にブレッドボード上で回路を...
 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) 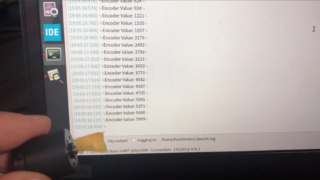 はしもとの自作マウス研修
はしもとの自作マウス研修  HM-StarterKitでマイクロマウスを始めよう
HM-StarterKitでマイクロマウスを始めよう  ESP32マウス(shota)
ESP32マウス(shota)  ししかわのマウス研修
ししかわのマウス研修