
こんにちは、しおたにです。
前回、サイズはおおよそ決めました。
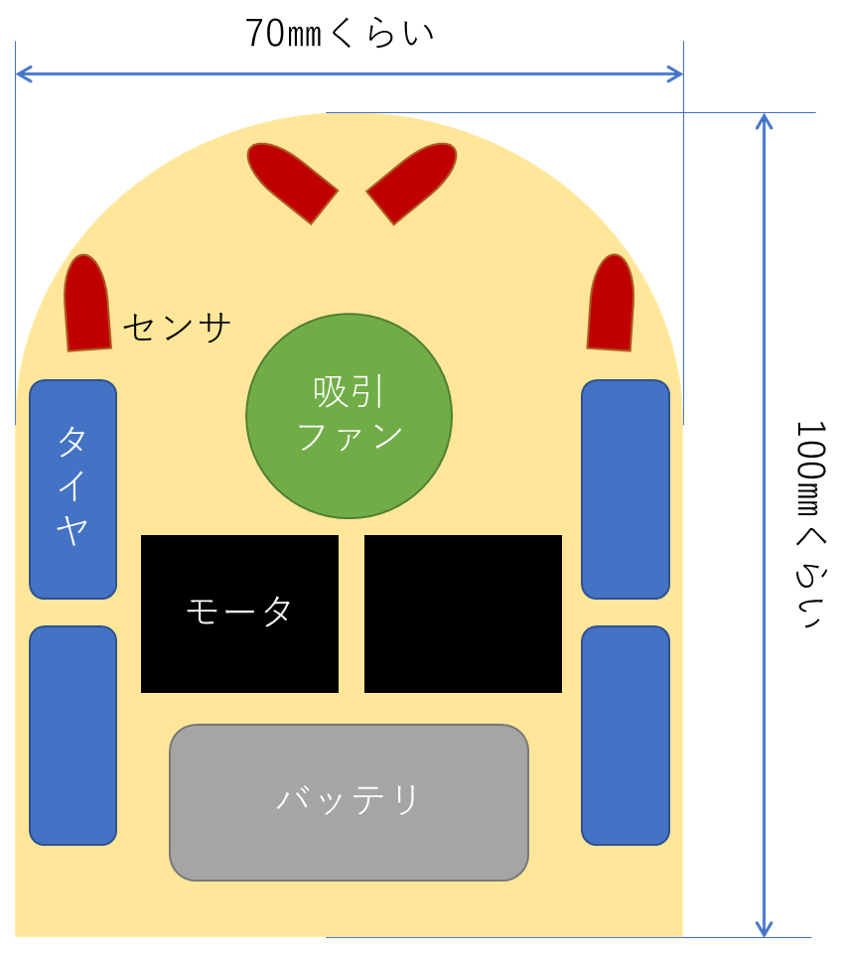
左右幅:70?程度
前後長さ:100?程度
今回はマシン全体のレイアウトを決めていきたいと思います。
レイアウトはこれ
結論から言うと、こんな感じにしました。
マイクロマウス界隈では変則4輪と呼ばれる配置です。
タイヤの間にモータの出力軸を出し、ギアでつなぎモータ1つで片側2輪を駆動させます。バッテリはロボット後部とし、モータを挟んで前側に吸引ファンを配置しました。
近年よく見られる配置だと思います。
ほかの候補としては、
- 車輪の前にモータを持ってくる
- 車輪の後ろにモータを持ってくる
- 車輪の間にモータを持ってくる
- 左右のモータを互い違いに配置する
などがありました。
ここで考慮したいのがロボット本体を回転させる際の(ヨー方向の)慣性モーメントです。
回転中心から重量物が遠ければ遠いほど慣性モーメントが大きくなり(=回りにくくなり)ます。
モータは1つ20g程度ですが、クラシックマウスの場合全体の重量が100g程度のものが多いため、モータ2つで40%近くの重量を占めます。
マウスではカーブはもちろん壁に追従するために自分の向きを頻繁に変えるためこれは無視できません。
このため、冒頭のようにモータは可能な限りロボットの中心付近に固めて配置し、ヨー方向の慣性モーメントを抑えたいと思います。
吸引について
吸引の効果についてまとめておきたいと思います。
当たり前の話ですが、タイヤで移動するロボットの場合、タイヤとフィールドとの摩擦によって動くことができます。また、最大静止摩擦力は動摩擦力よりも大きいので、タイヤが滑らずに回る方が、そして最大静止摩擦力を大きくできればより大きな力で移動できます。
タイヤとフィールドとの最大静止摩擦力Fは静止摩擦係数μと垂直抗力Nにより、
F=μN
と表せます。
摩擦力を高めてより大きな力をロボットに与えたいわけですが、μはタイヤの材質を変えることで多少変えることができます。Nの内訳はロボット重量mと重力加速度gの積ですので、大会会場の条件からmを変えるしか方法はありません。
では重くすればよいかというとそうではありません。特に影響が出るのがカーブ走行時です。
遠心力をF’としたとき、
F’=mrω^2
となります。(rは旋回半径、ωは角速度)
重くなる(mが大きくなる)と遠心力が大きくなりタイヤが外側に滑りやすくなるのでこれはよろしくありません。
そこで吸引機構です。
吸引機構をつけることで、垂直抗力と同じ向きに力を加えることができます。このため、摩擦力を増大させつつ、遠心力は抑えられます。
つまり吸引はすごい。ということで今回はここまで。