 いしかわのロボトレース研修
いしかわのロボトレース研修 いしかわのロボトレース研修【3】被覆剥きの壁
今回からいよいよトレーニングトレーサーを組み立てていきたいと思います。スライダのやすり掛け、モータケーブルの被覆剥きに挑戦していきます。
 いしかわのロボトレース研修
いしかわのロボトレース研修  NABEのロボトレース研修
NABEのロボトレース研修  キット製作研修
キット製作研修  NABEのロボトレース研修
NABEのロボトレース研修  いしかわのロボトレース研修
いしかわのロボトレース研修  せきぐちのトレーニングトレーサー研修
せきぐちのトレーニングトレーサー研修  d-satoのマイクロマウス研修 いしかわのロボトレース研修
d-satoのマイクロマウス研修 いしかわのロボトレース研修  マイクロマウス研修記(komi)
マイクロマウス研修記(komi) 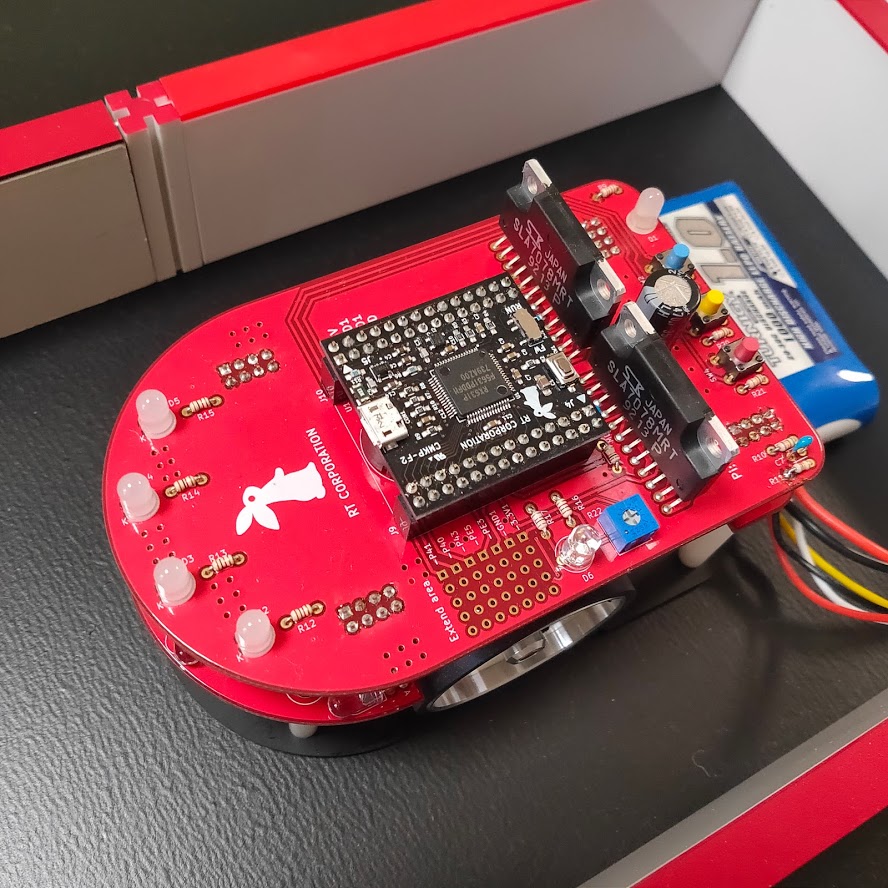 d-satoのマイクロマウス研修
d-satoのマイクロマウス研修