
はじめに
こんにちは、槇原です。本ブログではMEVIUSという4足歩行ロボットを製作する様子を紹介していきます。最近公開されたオープンハードのロボットの追試ということでこちらのロボットを試していこうと思っています。
また、以前から私が趣味で参加している、CoREというロボット競技会に4足歩行ロボット部門があります。今回はこちらに出場することを1つの目標として、まずはMEVIUSの実装をなぞっていこうと思います。
MEVIUSについて
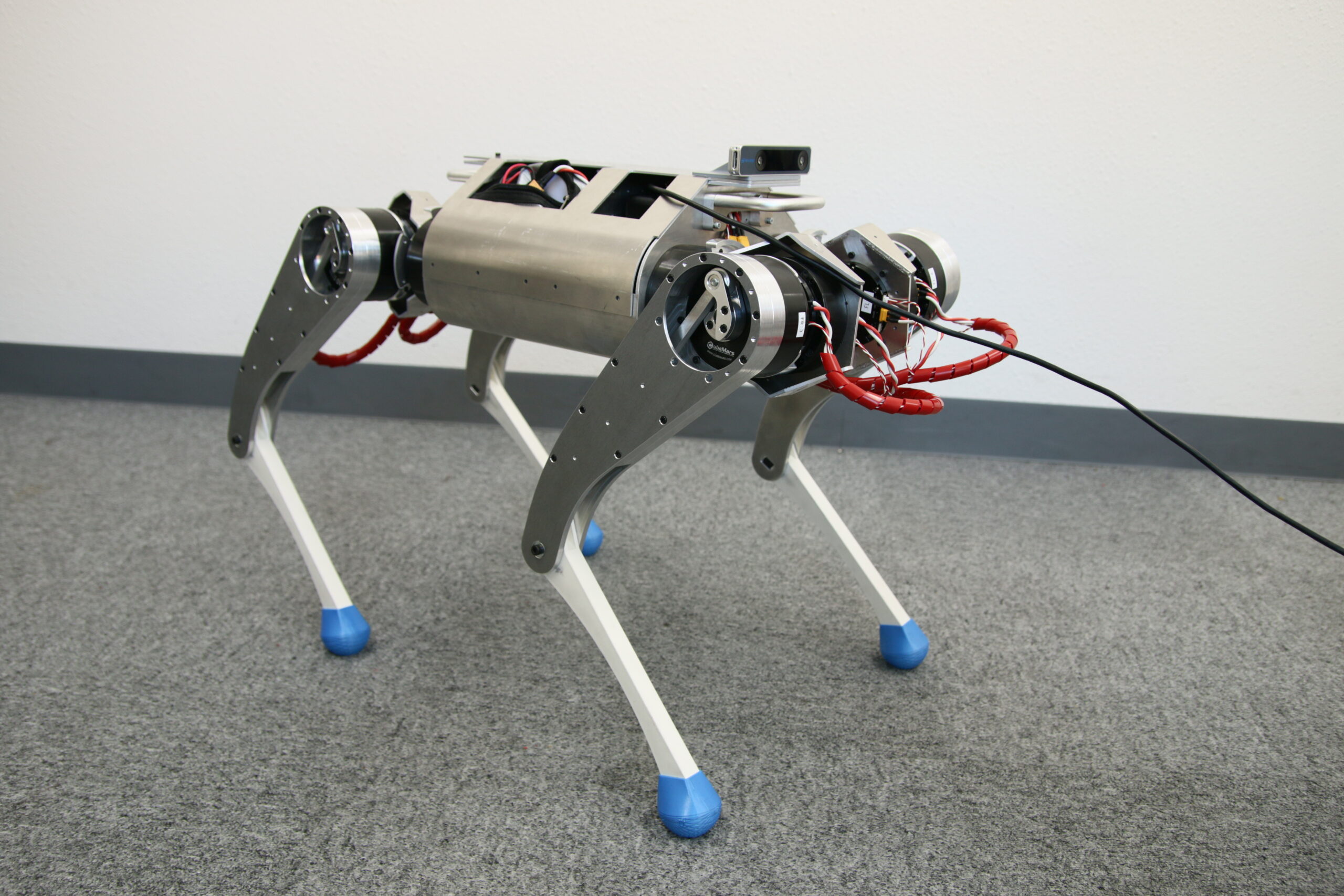
MEVIUSは東大JSKの河原塚先生らが開発された4足歩行ロボットです。meviyなどのサービスなどによって部品の発注と組み立てができるように設計されており、その設計データも公開されています。
小型の3Dプリンタ製のものとは異なり、基本的に金属製で激しい動きでも壊れにくくシンプルな構造で屋外実験でも十分利用できる点も特徴の一つです。
CoREについて
CoRE(The Championship of Robotics Engineers)は次世代ロボットエンジニア支援機構 Scrambleが主催するロボット競技会を中心とするエンジニア選手権です。FPSゲームのような操縦で、フライングディスクを打ち合うロボットを開発していく競技になっています。
前回大会までは基本的に移動ロボットを中心とした大会でしたが、次回の2025年大会からは、4足歩行ロボットもチャレンジ枠として導入されたました。ここでは4足歩行ロボットで段差を含むフィールドを走破することが求められています。
CoREに参加するために、自分やその他のアールティのメンバーを含むMA-KINGというチームで以前から趣味で開発をしていました。この度アールティからMEVIUSの製作費を出してくれることになったので、MEVIUSを作ってCoREに参戦することにしました。
次の大会は2025/3/29~30に島津アリーナ京都にて開催されます。Youtubeにて配信もされる予定ですので是非大会を見ていただければと思います。
先日開催したCoRE1部リーグでも告知しましたが、次回の1部リーグは開催日・開催場所が決定しております!
エンジニア選手権CoRE1部リーグ2025は2025年3月29日?30日に、京都市内の島津アリーナ京都(京都府立体育館)にて開催!
CoRE初の大規模な観覧席付き会場での開催、ご期待ください!#CoREjp pic.twitter.com/BThzJA8Fhr
? The Championship of Robotics Engineers: CoRE (@Scramble_CoRE) March 30, 2024
MEVIUSの組み立て
メカ系
前述の通りMEVIUSは基本的に必要な部品をmeviyを中心とした買い物の部品で制作することができます。MEVIUSのGitHubリポジトリにパーツリストや3Dプリントパーツのデータのリンクがあります。
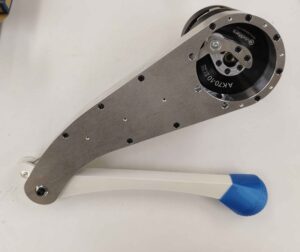
特筆すべきポイントとして、脛にあたるリンクは軽量で強度のあるポチコンフィラメントを使っています。こちらの印刷についてはグーテンベルクの3Dプリントサービスを利用しました。


meviy部品(左) ポチコンフィラメントで印刷された脛パーツ(右)
オリジナルの3Dモデルにはアセンブリデータが含まれていなかったので、アセンブリデータを作成しました。それをもとに組み立てを行いました。
電装系
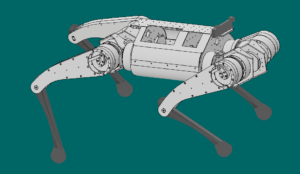
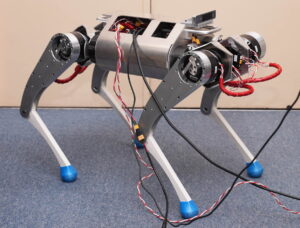
電装系の基本的な接続はオリジナル論文に以下の記載があるので、これをもとに実際の配線を行いました。
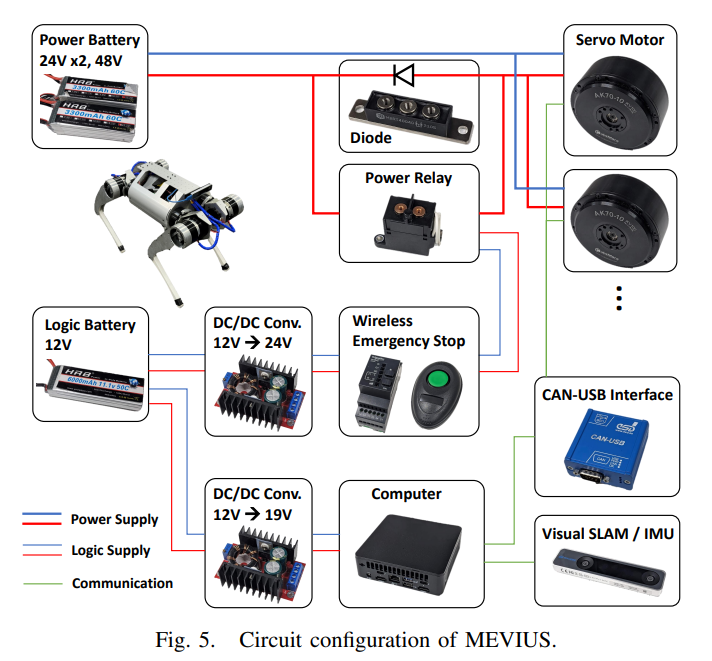
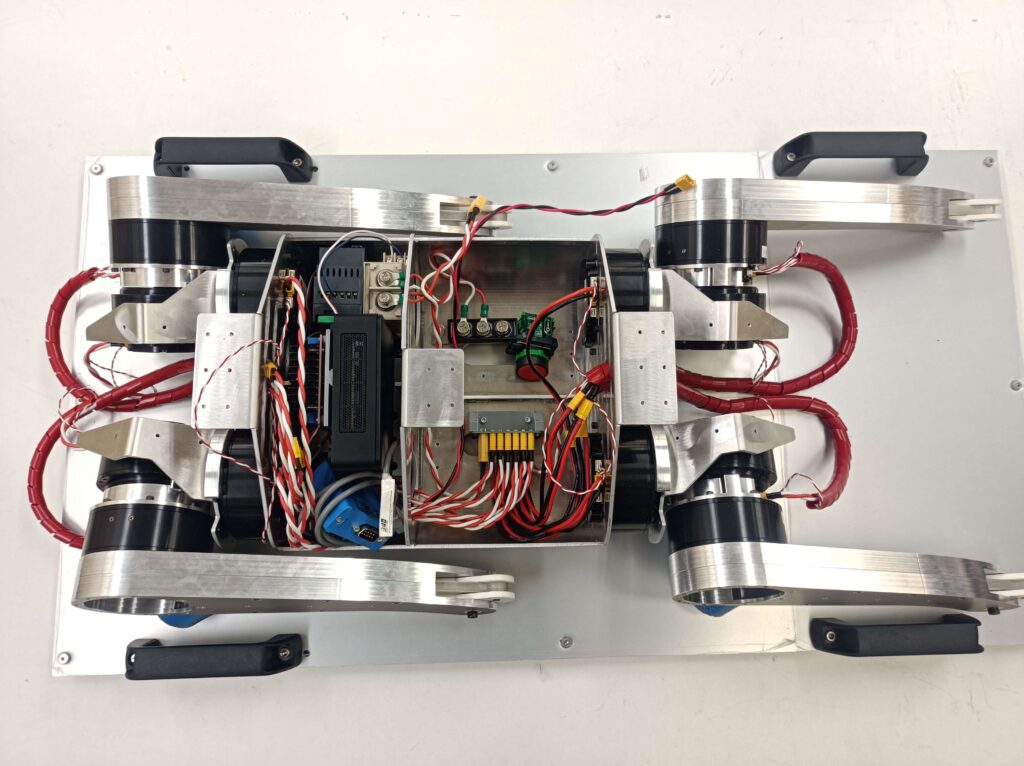
実際の配線はこのようになっています。右下の方の黄色い箇所に電源ハブ基板を作って取り付けました。そのほか部品の固定用に適宜3Dプリント部品を使って固定できるようにしました。
ソフトウエア
学習結果を利用して歩かせるというのが最終ゴールですが、そこについては次回以降のブログに書こうと思います。
今回はシンプルにモータに直接角度を指定して立ち上がる動作を行うスクリプトを書きました。
GitHubに通信テスト用のスクリプトがあるのでそれをベースに簡単な動作を作りました。
組み立てて、立ち上がった
今回はMEVIUSの組み立て編ということで組み立て、配線を行い、以下の動画のような立ち上がり動作を行いました。
立ちました!!#CoREjp#CoREjp_MAKING pic.twitter.com/wLBbydMG9Z
? MA-KING (@ma_king_core) December 15, 2024