 ししかわのマウス研修
ししかわのマウス研修 M5Stackにスタックできるケースを作る ? ししかわのマウス研修 Part.29
社員研修の一環で、マイクロマウスを自作して大会に出場します。前回に引き続きFusion360による外装設計の話題です。今回はM5Stackにスタックできる(重ねられる)ケースを自作したい方のために、作り方を紹介します。
 ししかわのマウス研修
ししかわのマウス研修  ラズパイマウスでROS 2を動かしてみた
ラズパイマウスでROS 2を動かしてみた  NABEのロボトレース研修
NABEのロボトレース研修  ショウのマイクロマウス研修
ショウのマイクロマウス研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修 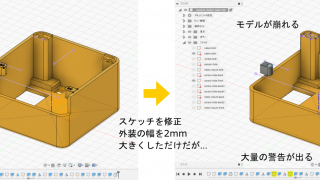 ししかわのマウス研修
ししかわのマウス研修  マイクロマウス研修(のり)
マイクロマウス研修(のり)  キット製作研修
キット製作研修  NABEのロボトレース研修
NABEのロボトレース研修  マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本)