 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修 しゅうのマイクロマウス研修 – Pi:Co Classic 3編 Part 8
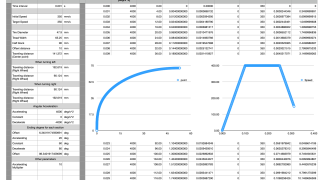
スラロームに必要な要素とシミュレーションの解説を行なっていきます。シミュレーションのパラメータを参考にしつつ、実際にマイクロマウスを走らせながらパラメータ調整を行いました。
 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  ラズパイマウスでROS 2を動かしてみた
ラズパイマウスでROS 2を動かしてみた  せきぐちのトレーニングトレーサー研修
せきぐちのトレーニングトレーサー研修  ショウのマイクロマウス研修
ショウのマイクロマウス研修  キット製作研修
キット製作研修  キット製作研修
キット製作研修  マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本)  いしかわのロボトレース研修
いしかわのロボトレース研修 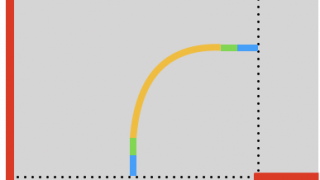 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  マウス研修(しおたに)
マウス研修(しおたに)