 しゅうの自作マウス研修
しゅうの自作マウス研修 モータを動かすpart1 – しゅうの自作マウス研修 part10
こんにちは、しゅうです。いよいよモータを動かしていきます!今回は、モータを動かすために必要なものやステップを洗い出して次回以降、実装などを行っていきます。使用するモータについてモータには様々な種類がありますが、マイクロマウスにおいては基本的...
 しゅうの自作マウス研修
しゅうの自作マウス研修 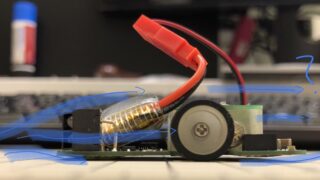 YUUKIの自作マウス作製記
YUUKIの自作マウス作製記  マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本)  ショウのマイクロマウス研修
ショウのマイクロマウス研修  YUUKIの自作マウス作製記
YUUKIの自作マウス作製記  ショウのマイクロマウス研修
ショウのマイクロマウス研修  マウス研修(しおたに)
マウス研修(しおたに)  はしもとの自作マウス研修
はしもとの自作マウス研修  しゅうの自作マウス研修
しゅうの自作マウス研修  マイクロマウス研修(のり)
マイクロマウス研修(のり)