
こんにちは、広報DTP担当のサナエです。
このブログは技術畑ではない広報がアールティのPi:Co V2と1シーズンともにすごした後、もうちょっと頑張って魅力をアピールしたい体験記第2シーズンです。
前回は大回りスラロームの調整用プログラムを実装して調整しました。これくらいかな?というところまではできた気がするので心安らかに最後のお題です。そして最終仕上げの全日本マイクロマウス大会への出場が待っています。アワワワワ!

Pi:Co V2とは!

Pi:Co V2(ピーコブイツー)は、アールティの教育や研究開発用小型移動ロボットのプラットフォームであるPi:Co Classic3同様、ソフトウェア開発の基礎を学びたい方に手に取っていただきたいロボットです。Pi:Co Classic3の機能やデザインイメージをそのままに、半分のマイクロマウスサイズになりました。
マイクロマウス競技に準拠しているのでもちろん大会参加もできます。
Pi:Co V2はESP32-S3マイコンを搭載しており、Arduinoで開発できます。
移動型ロボットのビギナーや、研究者、開発者まで幅広い方々にご利用いただけるロボットです。
Arduinoサンプルスケッチと解説書が付属するので、プログラミング初心者にもおすすめです。

大回りの最短を入れる
最後に大回りの最短走行用のプログラムを実装しますよ!
追加するのがfast.inoだけというのが最後感マシマシ!まとめって感じ!
ちみちみとfast.inoに大回りができる条件が成立した時のプログラムを追加していきます。

この時の0、0より大きいというのは数字で通常スラと大回りスラをあらわしたときの数字かな?シリアルモニタで見た時に表示された0、1、2…とかなのかな?2だったら大回りだよね?と想像して聞いてみたら全然違ってたー!ヒィン!
配列パターンは0、2など偶数のパターンが直線、1、3など奇数のパターンが旋回となっていて、進む先が0より大きいと大回りができる[i+2]>0となるという事らしい。
ちなみにこの旋回がひとつずつ左、右、左…と続いていくと、大回りではないという事とずっと旋回が続いていることがわかるので、ここで斜め走行ができる…らしい!なるほどというかマジかーというか。こうやって判別するんですねぇ。
大間違いだ!
ビルドも通ったところで早速走らせてみたところ、ターンは良い感じになってる気がするけれど、ゴールした後スタートまでの帰り道が妙に嫌な動きをします。たまにガクッとするところがまだあったようです。おかしいな、いい感じになった気がしたのに…と、前回直してみたところを見つつ色々考えてみたのだけれど、どうしても見つけられないよ!ヒィン!
帰りという事は既知区間加速のところでまだよろしくないところがあるのだろうという事で、仕事を終えて帰りかけていた先生を捕まえて一緒に見てもらいました。
そしてなんと今更2か所の間違いが発見され、いそいそと直します。自分で見つけられれば良かったのだけどグギギ!
straight関数のところでl_speedとなるのがl_accelになっている個所が見つかり、ここかぁああ!と直します。これだと加速するはずのところでガクッと減速、そのあとまた加速になるのですんなりと動いてくれなかったようです。
もう一つ、search.inoのstraight_countでif文がまるっとないところがあって、ガビーーーン!!!
ちゃんと見直したと思ったのになぜ!??これでビルド通っちゃうんだ??
これではカウントがずれてしまうという事で、よくこれで東日本大会で走れたなぁ、と…まぁゴールはできたけど帰ってこれなかったんだよね…てそれか?アアアア!運が良すぎた!全国大会前に見つかってよかった!!!
直しまくってゴール座標も(7,8)にして大会でも変えないぞと心に決めてレッツトライ!
大回りと帰りの動きがスムーズであれ!
やほーーう!思った感じに動いてくれました!
misc.inoで帰りの速度を変えられる場所もわかったし、かくかくせずに動くようになったし嬉しすぎる!
後はもうちょっと旋回の調整を頑張ります。会場ではセンサ値だけ見れば何とか……、ってくらいにしておきたいけどできるかな?どうかな、頑張ろう。
第46回全日本マイクロマウス大会 セミファイナル
大会前日の試走会では広報の仕事で写真を撮ったりしつつ、ちゃんと走るかなぁと空いている試走台をチラ見しつつひやひや。合間を見て走らせてみたところ、センサは触る必要がなさそうなのでしめしめヨッシャヨッシャ…!しかしながら最短走行がいまいちです。くねくねと旋回を繰り返しているとだんだん誤差がたまってきてぶつかってしまいます。やばい!!
何だろう、早すぎるか?加速度が高すぎるか?と思いつつも試走会の時間切れ、宿に入って4×4の迷路で試してみても問題ないし、大きな迷路じゃないとわからない…。どうする、悩むぅううう!
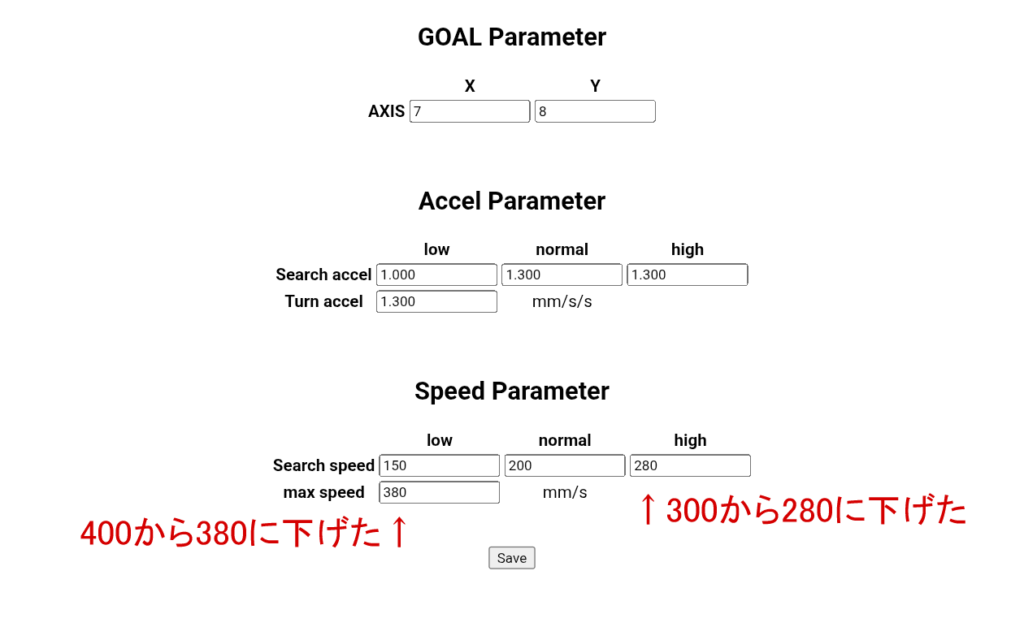
今回の目的は事務職がスラロームに挑戦するぞ!という研修をさせてもらって、アールティの看板を背負い大会に出場しているわけなので、できるだけ綺麗な走りを見せたい!遅くてもいいから何とか形にしたい!と思い、速さも気になるけど安定した走りを優先することにしました。今までHIGHと呼んでいた早めな速度のaccelを少し下げて、speedもほんのり下げて、これで優しく走れるかな?正直博打かもしれません。大会の直前に色々変えるのは危険だと聞いているし、ターンや直進の調整がうまく行ってない可能性もあるし、これでうまくいけばいいのだけれど…。
大会当日はなんとかなれー!早く終わってくれぇー!と思いながらプルプル順番を待ちます。緊張しいなのでもう倒れそう!
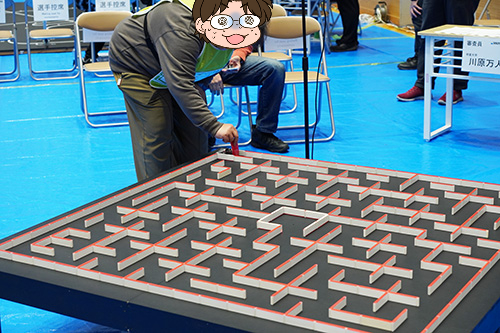
そして迷路の姿を見て愕然、あれだけ頑張って用意したのに大回りできそうなとこがほとんどないぞ?かどっちょくらいしかない?もしかして?長い直進優先とかあれば別だけどほぼ通らないのでは?
あっ、そうなると昨日ヤバイ!とおもった細かいターンがいっぱいなわけで、少し下げたaccelとspeedでちゃんと走るかどうかの瀬戸際ですよ!アバババババ!!!
今回、どうなるかわからなかったのでmisc.inoもちょこっとだけ触って
1、スラローム探索NOR(帰り重ね探索、安定してたので信じてる)
2、スラローム最短HIGH(帰り重ね探索)
3、大回りスラローム最短NOR(帰り重ね探索、やっぱりゆっくりだけどNORは安定)
4、大回りスラローム最短HIGH(帰りに失敗しやすかったのでゴールで止まるようにした)
5、大回りスラローム最短HIGH(帰り重ね探索なしでスタートへ戻るようにした)
の5本でお送りしまぁす! いや、時間足りないだろうけれどもし失敗したら次に行けるし?せっかく入れた大回りだから使うけれど、大回りの場所がなければ普通の最短だし?
ひ、東日本よりは走れるようになったから…!ドキドキ
走ってみたらやはり前日よりはちょっとだけ遅いけれど、何とか最短のHIGHでもゴールできました。やった!ああよかった、下げて正解だった!
3回目にまたNORで走ったものだからタイムが下がってしまいました。HIGHの最短に自信がなかったのでこの順番にしたけど、成功したんだから飛ばせばよかった…4走目のゴール手前でタイムアップになってしまいもったいない!冷静ではなかったですわぁー!
数回重ね探索してたのもちょっともったいなかったかな?終わった途端にひとり反省会が始まりましたが、まずはほっとしました!
なんだってー!?
私の次で午前中が終わったので、午後は心安らかに広報の仕事ができます。色々な競技をまわっていたら私の2走目のタイムが1位だったと聞いて、またまたそんな…て、マジですかー?
アバババババ!驚いた! ハワワワワワ!そんなこともあるものなんですね…!
技術交流会ではうまく説明できなくてすみません、初めて聞かれて慣れてなさすぎアワワし過ぎ!
Pi:CO V2の私の今回の速度とか細かい調整した数字などはちょっと違いますが、今シーズンで進めていたプログラムはサンプルとしてGitHubに公開されていますので、参考にしていただけると幸いです。多分私がおろおろ説明するより見たほうがわかりやすいと思う…。
また、webserverでの調整ですが、マニュアルが更新されたのでPi:Co V2をお持ちの方はぜひアールティのダウンロードサイトからPi:Co V2 ソフトウェア解説マニュアル(Arduino編)1.1版をダウンロードをしていただけると嬉しいです。webserverの設定や使い方が追加されています。ぜひいろんな方に使っていただきたい…!
ダウンロードサイトへのリンクはPi:CO V2ページからも行けます。

今回はこんな感じにしました。ぱっと見で悩めるので試しやすいと思います。お試しあれ!
家に帰ってからじわじわ実感がわいてきて一人でちょっと照れたりしてみて、やっと落ち着いた気がします。
ああ今シーズンも色々な方にお世話になって無事にスラローム研修を終わらせられました!
本当に本当にありがとうございました!!
旦那に2×2の調整用校正くんを作ってもらったり、きれいにPi:Co V2を真ん中に置くときの治具でまんなかくんを作ってもらったり(大会中は使わないですよ?)、調整にはほんとに役に立つアイテムですw
何よりむちゃくちゃ忙しいのにしつこい私の質問に付き合ってくださったA先生ほんとうにありがとうございました!!
社長からも美味しいものをごちそうしてくださるとの事だったのでウッキウキです!楽しみ~!!
色んなアイテムも一緒に頑張ってくれてありがとうね!いやぁー自分も1シーズンお疲れ!!と感慨に耽っていたらA先生から「シーズン3に何をしたいか考えておいてくださいw」と言われて
なんだってー!?
誰かもう少しブログにおつきあいしてくださる方いらっしゃいますかね?ホントにいらっしゃるならもうちょっと頑張れる気がする…!!
まさかの大会で大回りスラロームができなくてタイトル未回収という事はあったけど、とりあえず今回でシーズン2はおしまいです。ありがとうございました!
Pi:Co V2をこれからもヨロシク!
サンプルプログラムとマニュアルを見ながら少しずつ学べるPi:Co V2は現在好評発売中です。
Web shopにて定価60,000円(税込)です!
組込みや自律制御の基本要素を学ぶ方々はぜひ本製品をご利用ください。
企業や学生の研修に最適です。研修についてのご相談も承りますのでぜひお問い合わせください。
ご利用をお待ちしております!