
メカ設計ができたので、それをもとに基板の外形を決めます。
前方形状
他の参加者の前方の機体形状を見ると、様々な種類があります。
- 円形、楕円(最も多い)
- 台形
- 三角形
- 四角
- その他
台形や四角形などの前がまっすぐになっている形状は、前壁に当たったときに、車体姿勢の補正も兼ねられる気がします。
今回は楕円を基本として、若干調整ができるようにスプライン曲線を使ってみます。

走行中に位置や姿勢がズレて、柱に当たったとしても外形に沿って滑ってくれれば、クラッシュせずに走り続けてくれることを期待しています。
基板形状設計
鉄鼠は車体を支えるフレームを基板ではなくアルミ合金にしているので、基板外形は別途製作が必要になります。できるだけ基板設計がしやすいように形状をギリギリまで大きく取ります。また、樹脂スペーサでアルミフレームの上にマウントするので、取り付け穴を3箇所配置します。
6軸IMUセンサの設置場所は、車軸中心と制御設計時に決めているので、予め場所が分かるようにしておきます。また、スリットを入れるというちょっとした工夫をしてみました。加藤さん(弊社でBee Cloneという優勝機のコピーを100台限定で販売していた時期がありました)のマイクロマウストラブル事例集2013という大変参考になる資料から、着想を得て入れてみました。

ジャイロセンサの温度ドリフト補正は入れるつもりですが、少ないに越したことはないだろうと考えました。今は少ないことがわかっていますが、設計中のときはモータドライバの供給電流が多くなり基板が熱くなるだろうと思っていました。
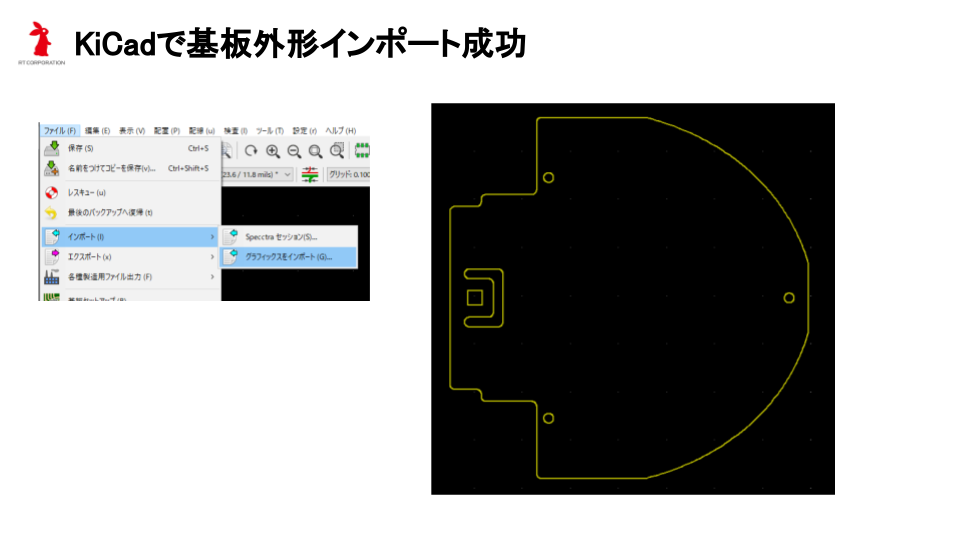
KiCadのDXFインポート
Inventorで設計した基板形状を、DXFでエクスポートして、KiCadに取り込みます。ただし、そのままでは失敗しました。

KiCadがインポートできるDXFはR12という形式のみ(6.1.2.1)であるということのようです。LibreCADで変換したり、OnShapeで変換したり、Design spark mechanicalで変換したりと皆さんそれぞれ試されているようです。
Cut2DでDXFの変換
手持ちのツールですぐ試せた方法で、私はCut2Dで行いました。オリジナルマインド社CNCであるKitmillを使う時のCAMツールとして使用しています。
DXFをインポートしたあと、デフォルトでDXFにエクスポートし直しただけです。

KiCadで無事、基板外形を取り込めました。
次は、基板設計のパターン配線に入ります。