 キット製作研修
キット製作研修 マイクロマウス研修(hara)その6
前回は、スラロームの実装を行ってみましたが、理論通りではうまくいきませんでした。旋回速度のパラメータをいじったら少しはましになったので、これを左手法の探索の部分に適用して動作を見てみます。
 キット製作研修
キット製作研修  キット製作研修
キット製作研修  いしかわのロボトレース研修
いしかわのロボトレース研修 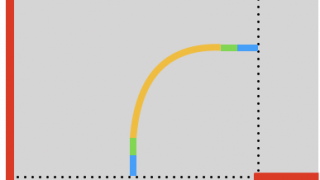 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  NABEのロボトレース研修
NABEのロボトレース研修 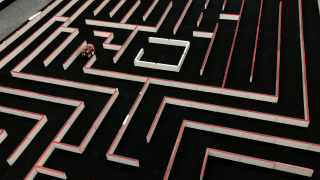 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  キット製作研修
キット製作研修  NABEのロボトレース研修
NABEのロボトレース研修  いしかわのロボトレース研修
いしかわのロボトレース研修  Jooのトレーニングトレーサー製作記
Jooのトレーニングトレーサー製作記