d-satoです。2020年4月1日に新卒で入社しました。初日から在宅勤務です。自宅からマイクロマウス研修を始めます。
Pi:Co Classic3キット編
Pi:Co Classic3キット編では自宅で作業する際の注意点なども含めてブログにまとめていきます。
- Part0 Pi:Co Classic3の組み立て準備
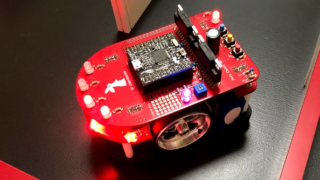
- Part1 Pi:Co Classic3の組み立て
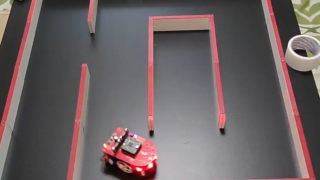
- Part2 迷路の試走
- Part3 開発環境の整備
- Part4 パラメータ調整
- Part5 パラメータ調整後の迷路走行
- Part6 スラローム走行実装のための調査
- Part7 スラローム走行を実装してみた
- Part8 VSCodeを使ったRXマイコン開発環境の紹介
- Part9 迷路をスラローム走行 (1)
- Part10 迷路をスラローム走行 (2)
- Part11 16×16迷路の初走行
- Part12 久々の走行と調整
- Part13 リファクタリングとスラローム走行
- Part14 第42回全日本マイクロマウス大会参加レポート