

d-satoです。初日から在宅勤務のため、自宅でマイクロマウス研修に取り組んでいます。記事一覧はこちらです。
前回は実際にロボットをある程度複雑な迷路内で走行させてみました。実装したスラローム走行で問題なく16×16の迷路を走行させられそうかを確認しておきたいので、今回は追加で2つの形状の4×4迷路について走行させてみます。
その前に、前回のPart 9から少し本体に手を加えたので、メモがてら紹介します。
ホイールの調整
実は最近、走行中に曲がりきれない(壁にぶつかって引っかかってしまう)ことがまれにありました。
しばらく走行させながら様子を見ていると、どうやら180度曲がったはずなのに190度ほど曲がっていることをゴールに着いたあとの方向変換で確認しました。
Gitでバージョン管理をしているので、更新履歴をたどってみましたが、パラメータを調整したわけではなく、旋回動作を書き換えたわけでもありません。
よく見るとホイールのゴムがずれてしまっていました。
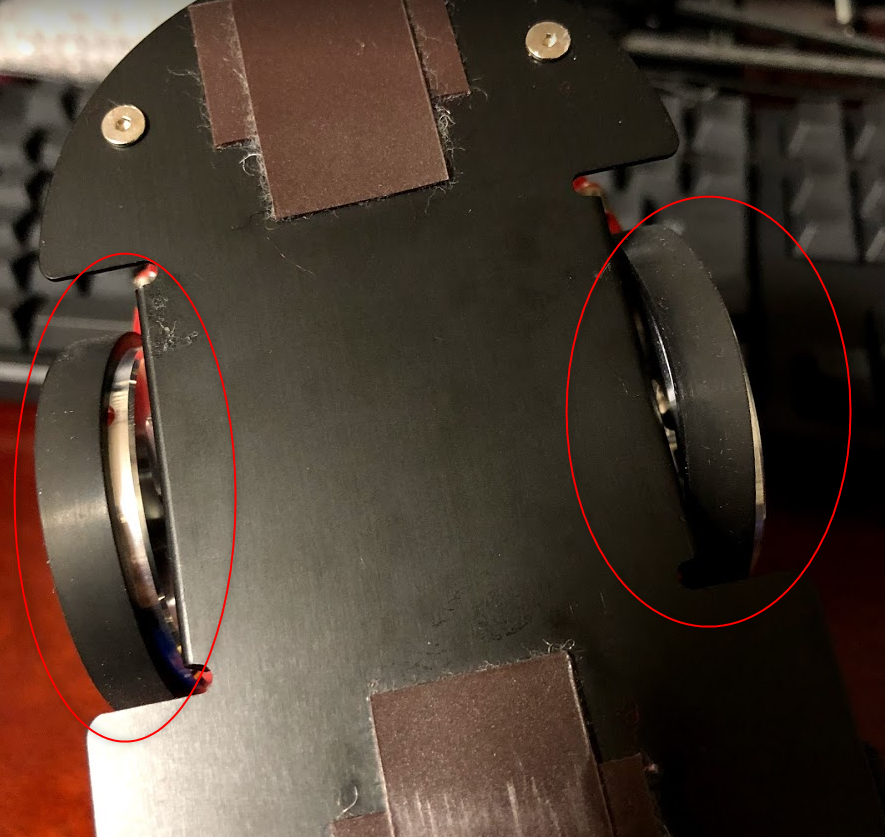
先輩たちはずれや段差対策のために両面テープを使って固定していたようです。

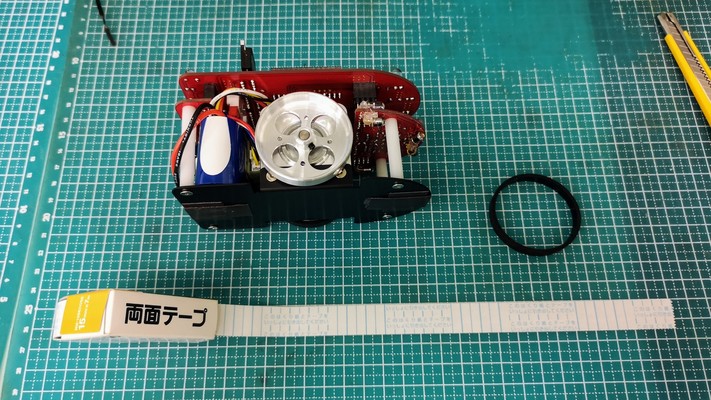
写真撮影時には適した両面テープが手元になかったのでとりあえずそのままゴムの位置だけ修正しました。修正後は旋回角度がずれてしまう問題が解消されました。
※後日両面テープを貼って、Part 4で行った調整と同様にタイヤ径とホイルベースのパラメータ調整をしています。
迷路 パターンA
何度も右に繰り返し曲がるコースです。
写真中のロボットがいる位置(2, 2)をゴールにしています。
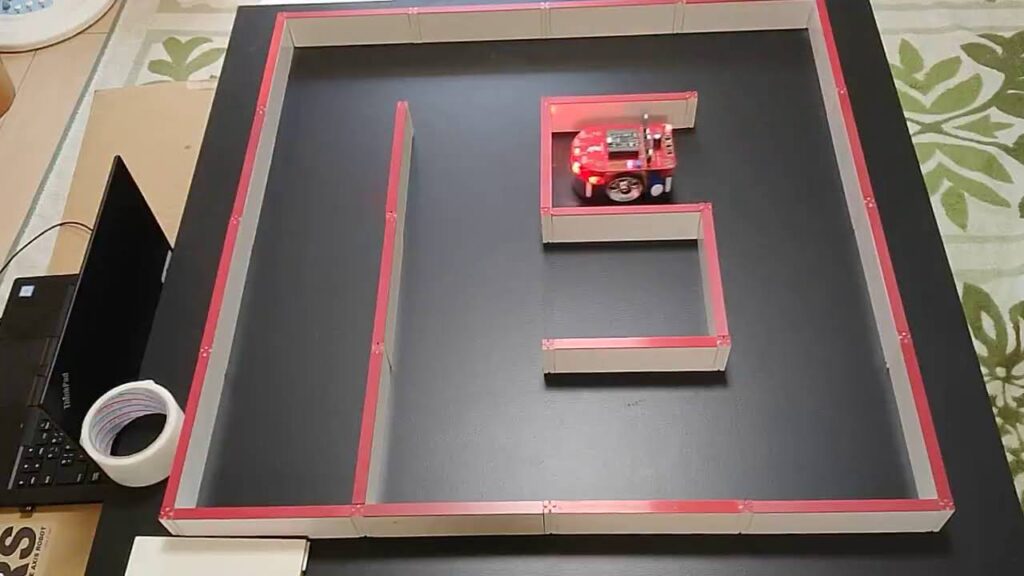
超信地旋回+直進走行の場合はおよそ6秒、スラローム走行の場合はおよそ4秒でゴールできました。
迷路 パターンB
左右に繰り返し曲がるコースです。
写真中のロボットがいる位置(2, 2)をゴールにしています。

少々曲がり方に不安が残りますが、超信地旋回+直進走行の場合はおよそ10秒、スラローム走行の場合はおよそ5秒でゴールできました。
今後の課題を探るためとりあえずこのまま16×16の迷路で走行させてみてることにします!次回はこの調整したロボットを16×16の迷路で走らせてみます。