 ショウのマイクロマウス研修
ショウのマイクロマウス研修 ショウのマイクロマウス制作-Part35 (最終回)
こんにちはショウです。前回、研修要件である大会完走をしたのでこれまでの内容を振り返って行きたいと思います。制御の組み直しなどもやっていたので気づいたら2年かかってしまいました。2年間でやっていたことを振り返っていきます。デバイスドライバ作成...
 ショウのマイクロマウス研修
ショウのマイクロマウス研修  はしもとの自作マウス研修
はしもとの自作マウス研修 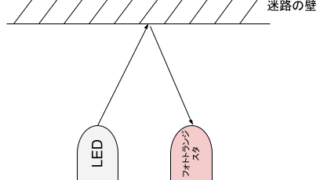 はしもとの自作マウス研修
はしもとの自作マウス研修  YUUKIの自作マウス作製記
YUUKIの自作マウス作製記  マイクロマウス研修(のり) ショウのマイクロマウス研修
マイクロマウス研修(のり) ショウのマイクロマウス研修  しゅうの自作マウス研修
しゅうの自作マウス研修 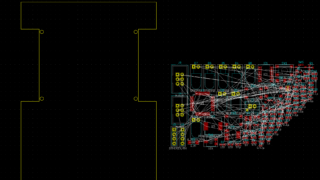 しゅうの自作マウス研修
しゅうの自作マウス研修 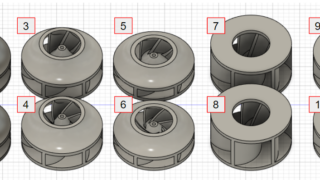 ショウのマイクロマウス研修
ショウのマイクロマウス研修 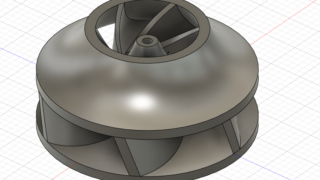 ショウのマイクロマウス研修
ショウのマイクロマウス研修