
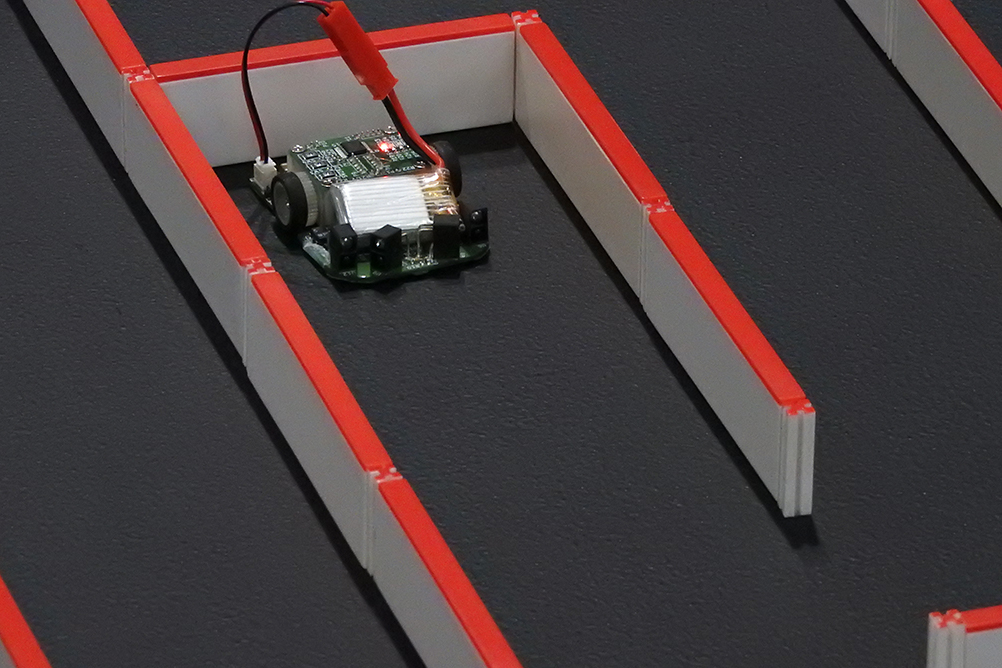
2020年以来ロボット大会の中止やサークルの活動制限が続く中、アールティにはロボット開発に取り組む方をひとりでも多く増やしたい思いがあり、2021年6月に学生ロボットサークルを対象として、マイクロマウスキット「HM-StarterKit」と4×4迷路のプレゼントキャンペーン※を実施しました。
※現在は受付を終了しております。
応募者の皆さまには応募条件の一つとして学生マイクロマウス大会への出場をお願いしておりました。
コロナ禍の影響で一度大会の延期もありましたが、昨年12月18日(土)に第36回全日本学生マイクロマウス大会が無事開催され、12の部活・サークルから総勢26名の方にご参加いただきました!!
(11月に開催されたマイクロマウス関西地区大会でも、数名の方がHM-StarterKitを使って出場してくださいました)
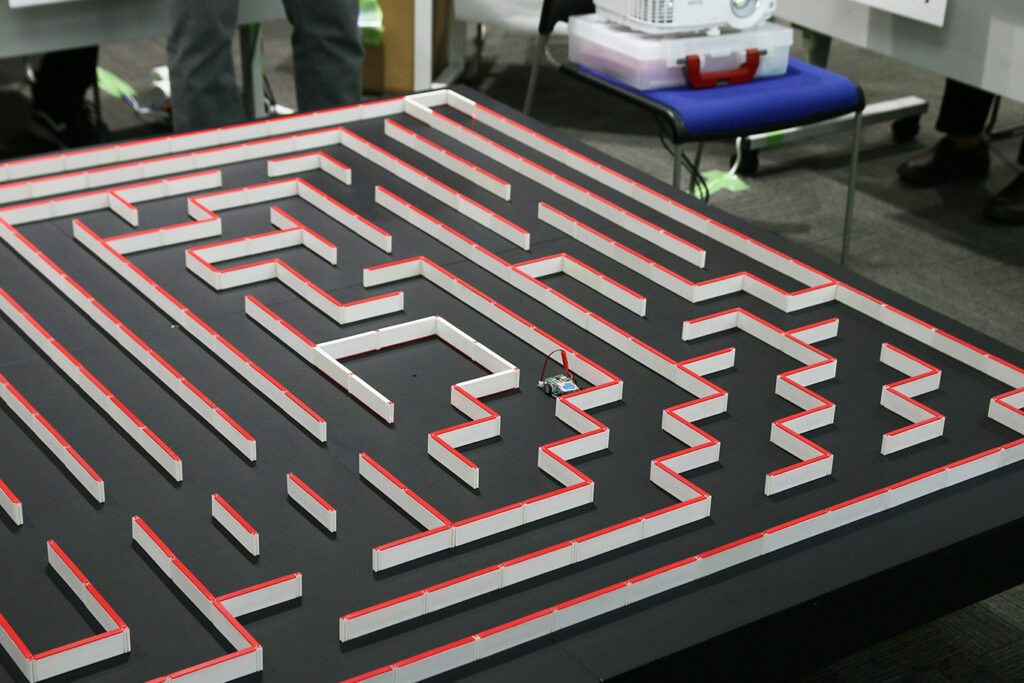
全日本学生大会の迷路は2019年と同じ課題が用意されました。開催期間が空き、出場者の顔ぶれも変わった今、どれくらいの技術を持っているかを確かめる意図があったようです。
スタート付近に直線が多く、まっすぐ走らせることが出来るか等の基本が重要となるコースでした。
完走出来た方、出来なかった方、機体の調子が思うようにいかず走らなかった方など結果は様々。
走った喜び、達成感、走らなかった悔しさ、上位入賞者のマウスの走りに対する憧れなど…色々な経験が出来たのではと思います。
またHM-StarterKitを使った出場者のうち、2名の方が以下の賞を受賞されました!おめでとうございます!
マイクロマウス競技 第3位:京都コンピュータ学院洛北校 制御通信部CINCS「jade」
マイクロマウス競技 特別賞:神戸市立科学技術高等学校 科学技術研究会「FirstMouse」
大会結果詳細(第36回全日本学生マイクロマウス大会HP)
アールティでは、HM-StarterKitで出場いただいた方を対象に、大会後のアンケートをお願いし、それぞれのロボットとの関わりや今までの経験、当日の感想などをお伺いしました。
(回答者21名)
出場者の声
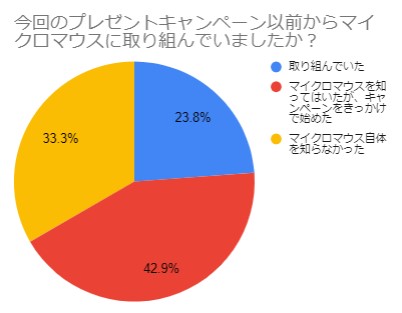
まず、今回の出場者のうち大半が、キャンぺーンをきっかけにマイクロマウスに取り組んでくれた方でした。
中にはマイクロマウスを知らなかった方、ロボットに関わったのもHM-StarterKitが初めてという方もいらっしゃいました。
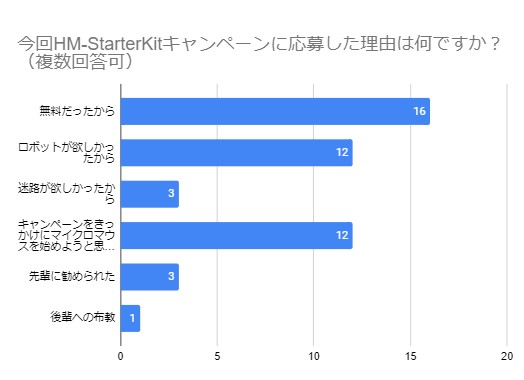
キャンペーンの応募理由についても伺いました。
今回は無料プレゼントのため、このキャンペーンをきっかけにマイクロマウスを始めようと思ってくださった方が多かったようです。
部活の顧問の先生や先輩がTwitter、メルマガなどでキャンペーンを知り、生徒や後輩に勧めたという声もお聞きしました。
今回HM-StarterKitを使ってみた感想や良かったところは?
- 組立済で解説ブログもあり、マイクロマウスを知らない人でも簡単に取り掛かれる。
- 初めて触る自分でも操作が簡単だった。
- HM-StarterKitは短い準備期間で大会に初出場してみたいという初心者に優しいキットだと思った。
- サンプルプログラムが一通り揃っていて解説も分かりやすい。
- プログラムのセンサーの値を変えるだけで十分動く。
- すぐに迷路探索までできるようになる。
- 誰でも簡単にロボットの仕組みを理解することができる。
- マイクロマウスで必要な知識を動かしながら学ぶことができる。
- DCモータの制御が学べる。
- 小さくて持ち運びが楽。
- 初心者はハードを作る時点で挫折することが多いように感じるが、キットを使えばすぐに動かすことが出来て良い。動いてるものがあるのとないのとでは、モチベーションにもかなり違いが出ると思う。
- HM-StarterKitにバッテリーを繋いで、サンプルプログラムをマイコンに書き込むだけで動作する点がいいと思った。
- マイクロマウスを1から作るとなるとプリント基板の設計から部品のはんだ付け、マイコンをセンサやモータと接続するための初期設定等の作業を行う必要があるので、マイクロマウスの完成までに多くの時間が必要になるが、HM-StarterKitはセンサに関連するパラメータを調整するだけで迷路を走行することができたので、すぐにロボットの位置補正を行うプログラムの作成や迷路マップの生成方法に変更を加える作業に取り掛かれた。

アールティオフィスでの直前練習会の様子
大会当日の走りはどうだったか?
調整内容について
- サンプルプログラムから、前壁センサでの位置調整とスラロームでの最短走行を実装して挑んだ。
完走した/うまくいった!
- 完走出来た。12/11に行われたアールティでの迷路貸出の時には走れてなかったので、直前の調整が上手く行ったのだと思う。
- 探索走行は、速度と角度推定がサンプルでしっかりと行われていたので、しっかりと走りきることが出来た。
- 最短走行では、事前にルートを決めずに走りながら進行方向を決定しているのが原因か分からないが、スラロームがあまり安定しなかった。しかし、1回だけ上手くスラロームでの最短走行が出来たので良い記録を出すことが出来た。
- しっかりと完走出来た。ただ、あまり調整できなかったこともあって安定感はなく、2次走行もすることができなくて少し悔しい。
- 直線が上手くいった。よく壁にぶつかったが、走行には問題はなかった。
- ひとまずの目標の完走を実践することが出来、また、迷路探索後の最短走行もクリアすることが出来た。自作したスラロームのプログラムが少し怪しい場面があったが、完走出来て良かった。
- 壁の読み間違いでリタイアすることはあったがなんとか完走してくれた。上記のリタイアで時間が無くなり参考記録にはなってしまったが最短走行もできた。
- 完走することが出来たが、スラロームの作成が間に合わなかった。
- 速度は遅めだったものの、ゴールまでの完走ができて個人的には満足している。
- 安定した走りをしていた。
惜しかった!
- 完走は出来なかったが、惜しいところまで行けた。
- 初心者かつ急いでいた中の調整だったが、途中まではうまく動いてくれていたのでちょっと嬉しかった。
うまく走らなかった…
- センサのしきい値の調整が足りずうまく走りませんでした。
- 調整用の迷路では曲がれたが、その後センサーの値を変えてしまい早く曲がりすぎてしまった。
- 最初の直線を真っ直ぐ走ることができず、横壁に衝突して停止した。
- クラシック、ハーフ共に完走できず残念な結果だった。
- 歯車の影響で正常に走れなかった。
- 直線の距離を正しく認識できなくて、実際の位置と認識している距離で誤差が出てしまったのと、壁を認識しきれなくて壁にぶつかってしまい、思ったより走行できなかった。
- 調整が足りず完走できなかった。
- マイクロマウスの姿勢制御や位置補正がうまくできなかった。大学で使用していたマス数の少ない迷路では前壁を用いた補正の効果があったが、大会では前壁が現れた時に近づきすぎていたと感じた。また、90度の超信地旋回を行う際に、120度くらいの旋回になっていた。これはセンサ関連のパラメータの調整が甘かったせいかなと思っている。
今後の課題が見つかった
- スラローム走行や斜め走行を入れることや、さらに探索を行い直線の多い経路を選択できるようにすることでタイムをさらに短く出来た迷路だったので、色々課題が見つかった。
- 自作のクラシックの方は環境光にやられたか、試走では全く起こらなかった壁の読み間違えが起きてしまった。センサ周りの回路設計からやり直したいと思う。
- 長い直線で誤差が溜まり、完走できなかった。袋小路での車体位置補正がほとんどできなかった迷路であったため、機体そのものの調整、特に長い距離走らせてのパラメータ調整の重要性を実感した。前壁補正でうまく切り抜けている人もいたので全日本では改良して再チャレンジしたいなと思う。
HM-StarterKitの開発を通じて得られた知識やスキルは?
ロボットの知識
- ロボットの作り方や、ロボットの魅力
- DCモータの制御手法
- DCモータ、ジャイロ、エンコーダーのプログラムを読み細かな設定をする力
- エンコーダーの仕組み(ロボトレースとはまた違った雰囲気を得られた)
- ハードの調整の難しさ
- 同じキットを使っていても、機体それぞれに特徴があって、それぞれにあったプログラムを作成しなければならないこと
- 自律走行を行うロボットの制御方法についての知識
マイクロマウスの基礎知識
- マイクロマウスの基本的なアルゴリズム
- マイクロマウス競技やハードウェアの基礎知識
- マイクロマウスのソフトウェア全般の知識、特にモード切替、探索アルゴリズム、DCモータ制御。ブログでの補正周りのノウハウ。
プログラミングの知識
- どのプログラムによってどう動いていくかといった基本的なプロセス
- プログラムを読むスキル
- 組み込みプログラミングには制約が多いこと
- C言語を使ったプログラムの構成を少し読めるようになった
- 他人のコードを解析する力
- C言語でプログラムを書く力。自分でプログラムを考え、実機に実装、実行しプログラムを修正する力。
理論
- 二輪の運動学と、スラロームの理論(クロソイド曲線など)
- PIDゲインの調整方法(実際の研究開発でも役に立つ知識なので知れてよかった)
- まだ学校では習っていない、積分やオメガなどの計算や物理的な考え方
- センサーパラメータ、足立法の基本的な知識
マイクロマウスの難しいところは?
知識経験
- ハードからソフトまで広い知識と技術が必要なところ
- 参考書が少ない所(独学となると情報集めが難しい)
- ネットに具体的な資料があまり載っていない
プログラミング
- センサから得られるデータを処理の過程でどのように利用するか
- 速度を上げるために具体的にどうすればいいか様々な手段があるところ
- 壁を読み間違えないようにすること
- 誤差が溜まることにより走行位置がずれていく点
- PIDの設定
- 壁の認識を正確に行うプログラムを作成する点
- プログラムを改良してもうまく動作してくれないところ
- 思い通りには動かないところ
- マイクロマウスが走行する際の位置や姿勢を正確に保つこと
- 今回の調整では走行中にマウスの状況やセンサの値を取得することができないので、どこで失敗しているかが分かりにくいところ
ルール
- 完走させること
- マイクロマウス競技はルール上機体が小さくなるため、ハードの調整や設計に苦労する
環境
- 最初に置く位置によって、動作が変わってしまうところ
- 練習と本番でセンサで読み取る光の具合が変わるところ
- 会場の迷路のコンディションによって当日調整を考えなければいけないところ
マイクロマウスの面白いところは?
自分でできるから面白い!
- 自分で制作し、準備したロボットで競うところ
- メカ、エレ、ソフトの全てを自分でやるからこそ感じる達成感の強さ
ロボットを動かすのが面白い!
- 大会などで、自分の機体が迷路を走っているときワクワクするところ
- 自分が書いたプログラム通りに機体が動くところ
- 適切なプログラムを書くことで、自分が想定していたような探索を現実世界で実行できる点
調整が面白い!
- 上手く調整できてゴールした時の達成感
- 速度を上げると自分が積み上げていたプログラムじゃ対応できないことがあり、根本から考え直す必要性があるところ
- 中心を綺麗に速く走るか調整するところ
- プログラムを調整した分だけきちんと動いてくれるところ
- 課題を解決していくところ
ルールが面白い!
- 完走が難しいこと
- 迷路をどう早く完走させるかと考えること
- ルートがひとつじゃないので、多様なところ
- 制約が多い中でいかに効率よく選択するかを考えること
- 終わりがないところや参加者によって機体や走行方法が違うところ
- 毎年同じようなルールであっても、年ごとに違う挑戦が出来そうなところ
- 異なる環境やコースにも対応できることが求められる点
- 迷路の走行時間を短くすることに純粋に挑戦し続けられるところ
- 迷路の経路以外は毎年同じレギュレーションで行うため、他のロボットコンテストに比べて大会に出場した経験が次の大会でより速く走らせるために生かされやすいところ
- ロボットを対戦させる相手や人間が操作を行うこともないので、純粋なロボットの性能で決まることが分かりやすくて面白い

マイクロマウスで培った技術を今後何に活かしたい?
- 今後自分のマウスの製作
- ロボットの改良
- 他のロボット大会にも出場したい。
- どこにでも使える技術ばかりなので今後の趣味開発や仕事などに活かしていきたい。
- アルゴリズムなどはこれから多くの場面で求められると思うので活かしていきたい。
- ロボットを使った無線給電の研究に取り組んでいるので、走行のための制御の知識を活かしたい。
- 他の制御を行う全てのことに活かせるのではと思っている。
- 自身のロボット開発の参考にしたい。
- ハードウェア及びソフトウェアの設計に役立てたい。
- 車の電装関係などの制御に活かしたい。
- サークル活動や他のロボット、マイクロマウスの制作に活かしたい。
- 開発にせよ研究にせよ、試行錯誤しながら問題解決に向けて調整をしていくという経験は活きてくると思う。
- 大学の研究に活かしていきたい。
- PDCAサイクルを繰り返す経験ができたと感じている。今後の研究等で今回のPDCAサイクルの反省を生かしてスムーズに実験を進めていきたい。
- ハードウェアとソフトウェアの両面で切り分けて問題を解決できる組み込みエンジニアになれるように経験を活かしたい。
- 自分の今の実力と知識なら何を優先して取り組めばスケジュール通りに目標に近いロボットが作れるのか予め考える能力も今後色々なことに活かせそう。
*****
アンケートにご回答いただいた皆さま、ありがとうございました!
今回たくさんの項目をご回答いただいたため本記事でご紹介しきれなかった内容もございます。とくに開発中の課題や解決に関することは今後技術ブログなどでご紹介し、移動型ロボットを開発する方のお役に立てればと思います。
いただいた貴重なご意見をアールティの今後の製品開発にも活かして参ります。
HM-StarterKit 製品情報

RT ROBOT SHOPで購入する
