

はじめに
こんにちは、槇原です。今回は板Pi:Co編のまとめということで、過去のブログを振り返ります。
ハードウェア
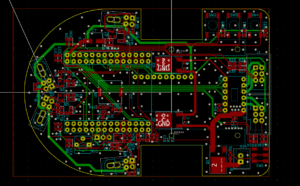
回路設計
回路設計については、もともと社内のリファレンスの回路があったため、新規で設計した部分は特にありませんが、アートワークや外形の寸法は自分で決定しています。
板Pi:Co編始まりました ? マイクロマウス研修(槇原)Part3
Fusion 360で作成した基板外形や3DモデルをKiCadにインポートする ? マイクロマウス研修(槇原)Part7
アートワークと基板発注 ? マイクロマウス研修(槇原)Part8

メカ設計
メカ設計では主にモータマウント部分の設計を行いました。ギア比計算などは必要な要件が決まっていればおのずと決定する箇所が多いためどこを目標に設定するか、制約条件が何かを設定するところがポイントだと思いました。
ギアとモータマウントの設計その1 ? マイクロマウス研修(槇原)Part4
ギアとモータマウントの設計その2 ? マイクロマウス研修(槇原)Part5

壁センサ取り付け角度について考察を行いましたが、今回の機体では壁切れなどを行わず単純に壁検知と壁制御のみを行ったのでそこまでセンサ角度について問題が起こったりはしませんでした。
壁センサ取り付け角度について ? マイクロマウス研修(槇原)Part6
モータマウントやギアについてJLCPCBの3Dプリントサービスを利用しました。材料はLEDO6060 Resinを使いましたが、半年ほど利用して特に故障したりといったことは起きませんでした。慎重に動かしていたのであまり壁にぶつけたりした記憶がないのでそれもよかったのかもしれません。
ハードウェア完成 ? マイクロマウス研修(槇原)Part10


ソフトウエア
マイコンペリフェラルを触る
基本機能について必要なレジスタをひとつずつ解説しました。
RX631へのUARTによるプログラムの書き込み? マイクロマウス研修(槇原)Part11
RX631でMTUを使ってPWM信号を生成する ? マイクロマウス研修(槇原)Part12
RX631でMTUを使ってエンコーダを読む ? マイクロマウス研修(槇原)Part14
RX631でA/D変換をする ? マイクロマウス研修(槇原)Part17
RX631でMPU-9250からデータを受信する ? マイクロマウス研修(槇原)Part18
シミュレータ
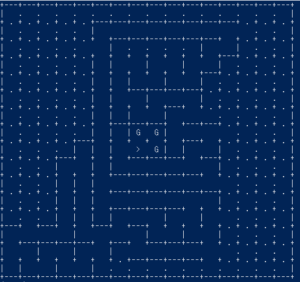
迷路を解く部分をシミュレータと実機両方で使えるようにしました。実機で迷路を解くアルゴリズムを試す時間を大幅に短縮することができるようになりました。
迷路シミュレータを作って実際の迷路で走らせてみた ? マイクロマウス研修(槇原)Part15
走行部分
基本的に各車輪の速度制御を行っていて、足立法で計算した次の方向を目標軌道に変換して各車輪の速度制御指令値にしています。壁に近づきすぎないように現物でチューニングしたパラメータを使って走らせました。壁制御を信じて機体の位置制御はしていません。回転するときだけはIMUの角度を使った角度制御を行いました。
大会結果報告
去年度はオンラインの地区大会と全国大会に出場したのでそのレポートです。全国大会のブログの方ではやり残した課題についても書いています。次回のオリジナルのマウス研修で念頭に置いておきたいです。大会でも準備していたベストな走行ができたので良かったです。
マイクロマウス北陸信越地区大会2022にエントリーしました ? マイクロマウス研修(槇原)Part13
第43回全日本マイクロマウス大会に参加した ? マイクロマウス研修(槇原)Part16
今回は社内のリファレンス機体をベースにクラシックマウスを作製しましたが、今後は完全自作のマイクロマウスを作っていきます。