
はじめに
こんにちは、槇原です。前回まではPi:Co Classic3を使ったマイクロマウス研修を行ってきました。ひとまず迷路の完走はできたので、次はDCモータで走行するいわゆる板マウスを作っていきます。
今回の板Pi:Co編では、自作のマウスを作る前の練習として板マウスを作ります。リファレンスとなる板Pi:Coという機体があって、こちらを真似しながら板マウスを作成して迷路の完走をしていきます。
板Pi:Coについて
板Pi:Coはアールティ社内研修用に作成された機体です。詳細はこちらで見ることができます。
この機体はPi:Co Classic3の基本的な回路などが踏襲されていて、DCマウスとして必要なモータ部分やエンコーダ、ジャイロセンサなどが追加され、部品も表面実装部品がなるべく利用されているものとなっています。
今回の板Pi:Co研修としては、回路図と部品が支給されていて、それをもとに基板のレイアウトや、モータマウントの設計などは自分たちで作ることになっています。
また、ここで作成した板Pi:Coは公式大会にエントリーはせずに、研修後にオリジナルの自作マウスを作成してそちらで大会にエントリーする流れになっています。
回路図の作成
最初はもともとあるリファレンスとして与えられている回路図を自分の手元のKiCADの方でも書いていきます。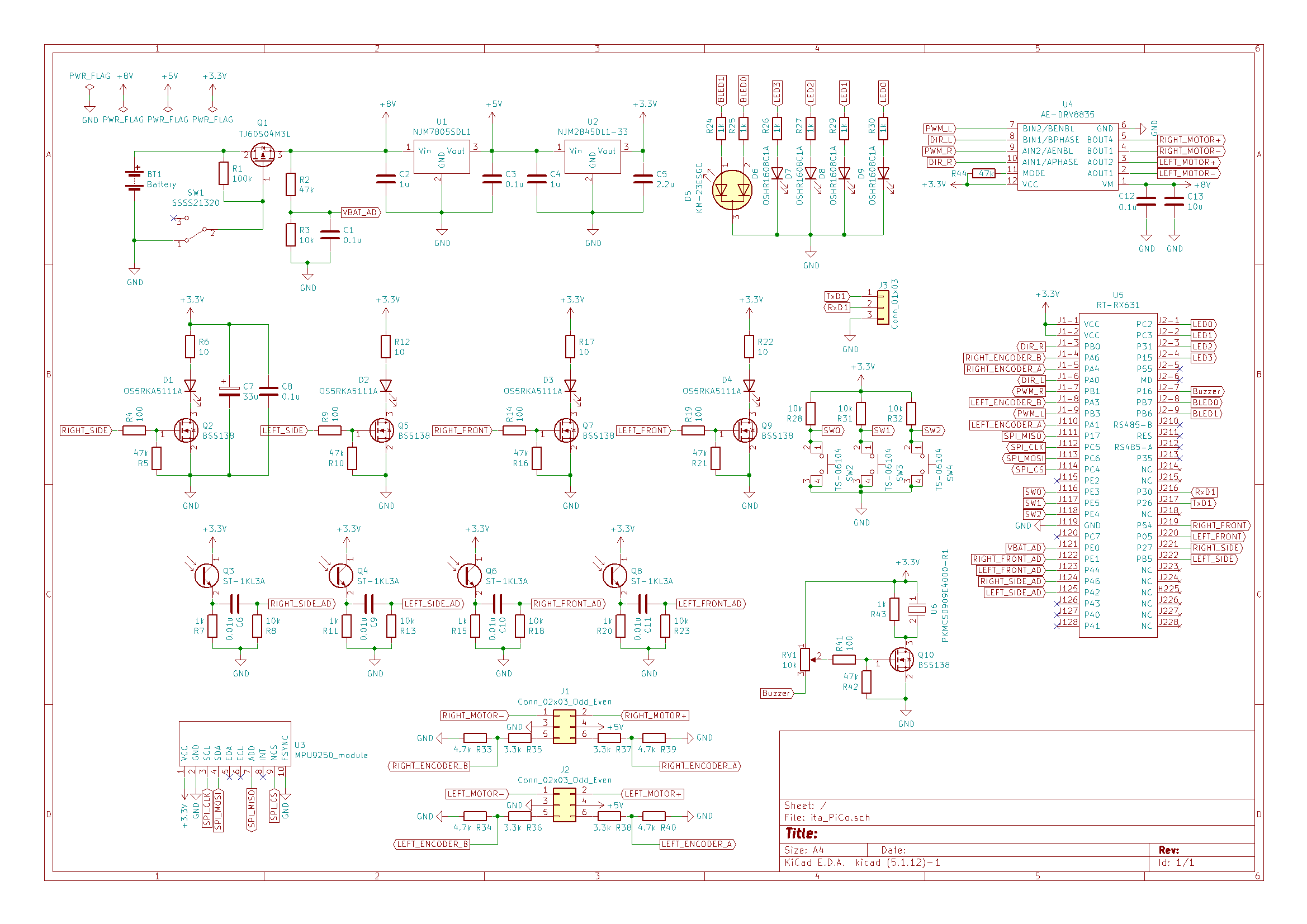
こんな感じになりました。
主要な部品としては次のようになっています。
・マイコン:RX631搭載CPUボード
・モータ(エンコーダ付き):FAULHABER1717
・モータドライバ:秋月電子のDRV8835モジュール
・ジャイロセンサ:MPU9250
・LED/ディテクタ:OS5RKA5111A/ST-1KL3A
次回は基板形状を決めるためにモータマウントの設計をやっていきます。