 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修 KiCadで回路設計 – 加藤の自作マイクロマウス研修 Part. 3
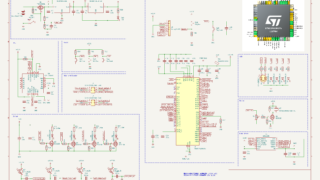
こんにちは、アールティの加藤です。本連載ではオリジナルのマイクロマウスを製作する研修(自作マイクロマウス研修)について書いていきます。前回の記事ではギア比の計算、部品選定、回路のブロック図の作成を行いました。今回はKiCadを使って回路を設...
 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  ラズパイマウスでROS 2を動かしてみた
ラズパイマウスでROS 2を動かしてみた 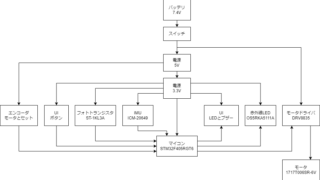 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  加藤のマイクロマウス研修
加藤のマイクロマウス研修  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)  マイクロマウスPi:Co改造研修(河野)
マイクロマウスPi:Co改造研修(河野)  Pi:Co V2 体験記
Pi:Co V2 体験記  Pi:Co V2 体験記
Pi:Co V2 体験記  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)