
はじめに
こんにちは、槇原です。前回は足回りのギア比を決定しました。今回は磁気エンコーダの選定とそれに合わせたモータマウントの設計をします。
磁気エンコーダ
今回はMPSの磁気エンコーダの中から選びます。
検索条件は以下の通りです
・SPI接続
・QFN-16 [3×3] パッケージより小さいもの
・14bit
分解能が高く種類が多いため
・最小の磁界は最も低くて大丈夫なもの
小さい磁石しか使えないため磁界は小さくなりがちなため検出しやすいものを選ぶこと
⇒在庫もあるMAQ473を使います。
磁石サイズはは機械的にΦ4 mmくらいに収める必要があります。サイズ的によさそうな磁石としてこちらを利用することにしました
https://www.neomag.jp/shop/shoppingcart/itemdetail.php?itemno=ND00400200014K&qty=1
ページよりこの磁石の磁束密度は412 mTです。
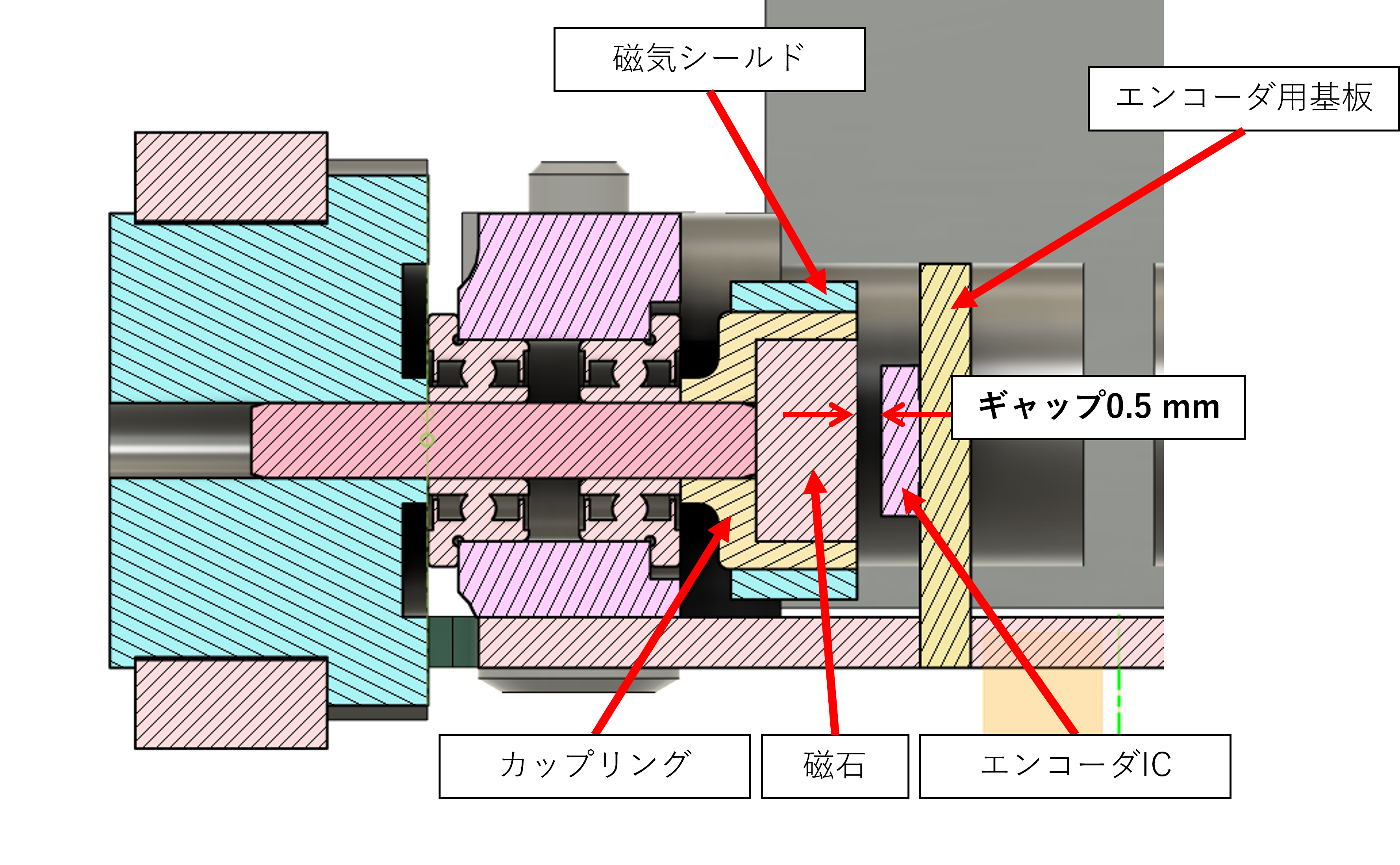
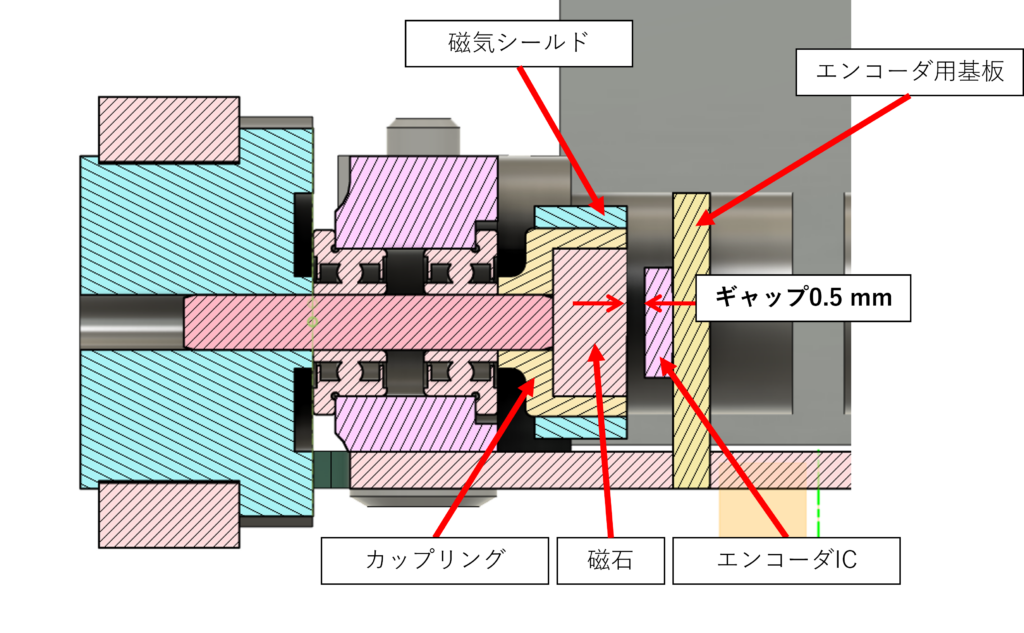
こちらをもとにシミュレーターに入れて磁気エンコーダIC部での磁束を確認します。磁石とICとの距離は近ければ近いほどセンサとしては正しく測定できますが、機械的なクリアランスが必要なのである程度距離をとる必要があります。今回は0.5 mmのギャップを付けることにします。
| 項目 | 値 |
|---|---|
| Sensor Location | End-of-Shaft |
| Magnet Type | Cylinder |
| Brem : Magnet Remanence | 0.412 T |
| H : Magnet Height | 2.0 mm |
| OD :?Magnet Outer Diameter | 4.0 mm |
| r : Radius Between Magnet Center and Sensor Sensitive Point | 0 mm |
| z : Z offset Between Magnet Center and Sensor Sensitive Point | ?2.0 mm (0.5 mm air gap) |
| Sensor Part Number | MAQ473 |
| Sensor Size : Length x Width x Height (LxWxH) | ?3 x 3 x 1 mm |
| Sensor Filter Cutoff Frequency | 370Hz |
シミュレーション結果はBm 39.5mTとなり、これはMAQ473の最小の磁界 Bmin 30 mTよりおおきくなっているのでこの条件で進めます。実際にはモータ磁石にエンコーダ用磁石が引っ張られないよう金属製の磁気シールドを覆うので若干条件が変わってしまうと思われますが、今回はこのまま進めます。
以下の図は磁石とエンコーダの取り付け部を示しています。
モータマウント
前回のタイヤのギア比と今回のエンコーダを含めて足回りの設計を行いました。
モータマウント、ホイール、磁石と軸のカップリングは3Dプリント部品を使います。
それ以外の部品は次の通りです。
| 項目 | 型番 | URL |
|---|---|---|
| ピニオン | RT-PN | リンク |
| モータ | MK06-4.5 | リンク |
| タイヤ | RT-MM_TIRE20_10 | リンク |
| フランジ付きベアリング | F681X-H-ZZ | リンク |
| 平行ピン | HPA-1.5X12 | リンク |
| 超極低頭ボルト | CBSTBR2-10 | リンク |
| 六角ナット | HNT2-SUS-M2 | リンク |
| ネオジム磁石(N35H)、円柱型、Φ4×2(mm)、径方向 | NO125 | リンク |
| スペーサ(磁気シールド用) | CF-502.5ZE | リンク |
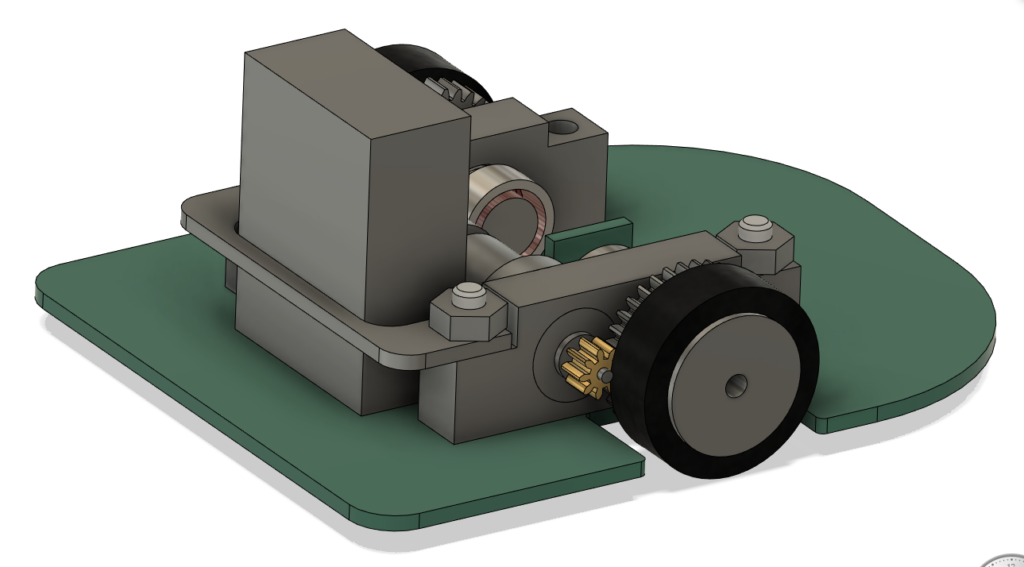
機体の全体像とモータマウントは以下の図のような形状です。モータ、ベアリング、シャフト(平行ピン)等の部品は基本的にはめあいによって固定します。モータマウントと基板はねじによる締結、モータとピニオンは金属用接着剤によって固定します。モータマウント固定用のねじは基板の裏面に頭が来るため、なるべく薄い0.5 mmの超低頭ねじを選びました。
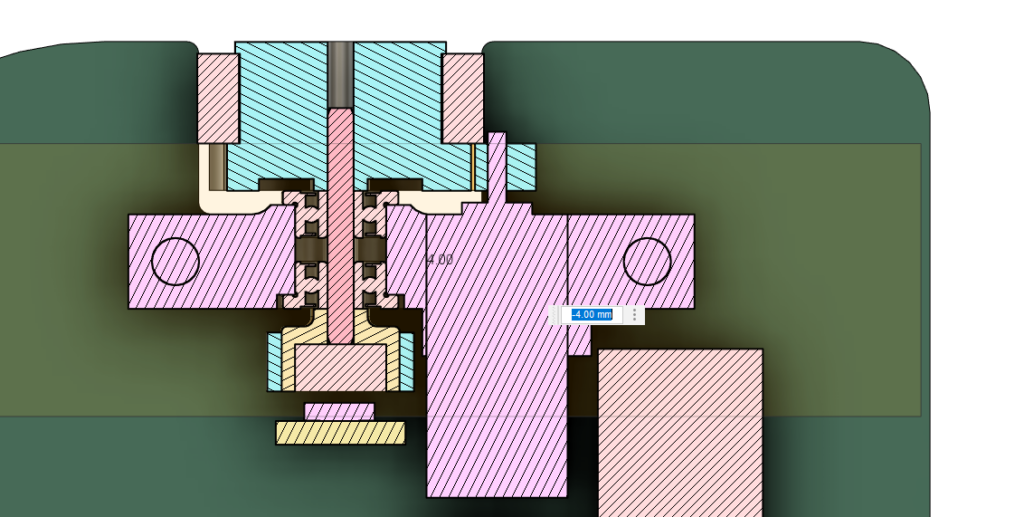
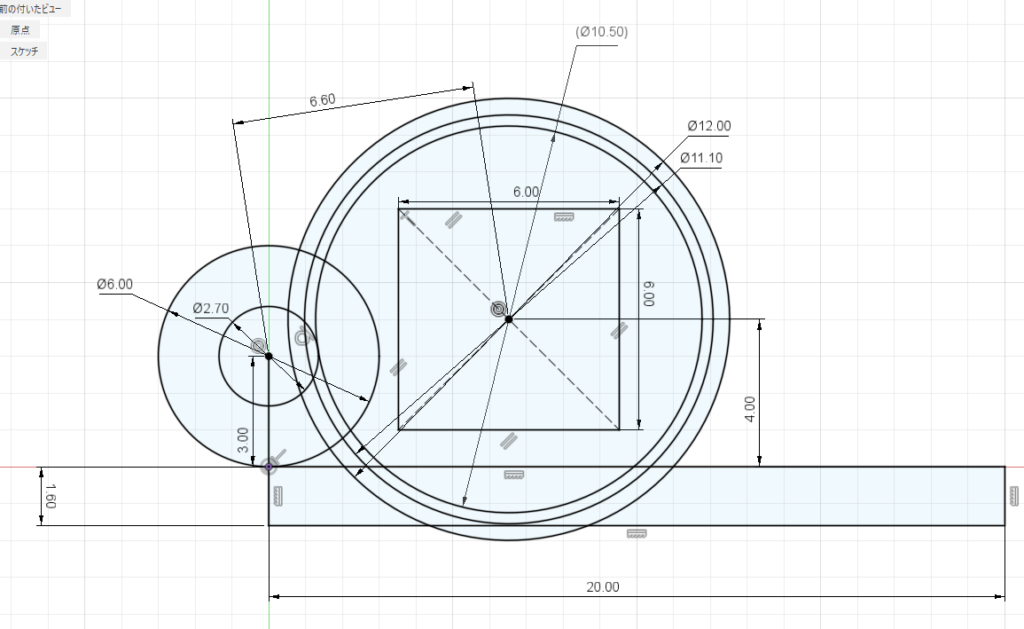
軸間距離等は前回のブログで決めた通りです。磁気エンコーダは3×3 mmで基板サイズは幅6 mmに収まるように軸間距離、ギア比を決めています。
全体像は次のようになりました。後ろの方にある直方体はバッテリーです。モータマウントの間に収まるサイズにしていて、モータマウントと一緒に取り付けられるようなコの字型のパーツと合わせてバッテリーホルダーにしています。
次回は回路設計について書いていきます。