 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) PCBgogoに基板発注(KiCad7) ? 100日後に完走するマウス【332日目】 Part.13
基板発注前回作ったプリント基板(PCB)のデータを加工し、PCBgogoに発注します。ガーバーファイル(プリント基板データ)作成ガーバーファイルとは、プリント基板(PCB)の製造に使用されるファイルフォーマットです。基板製造サービスでは、基...
 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  2024年度マイクロマウス新人研修
2024年度マイクロマウス新人研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  2024年度マイクロマウス新人研修
2024年度マイクロマウス新人研修  2024年度マイクロマウス新人研修
2024年度マイクロマウス新人研修  マイクロマウスPi:Co改造研修(河野)
マイクロマウスPi:Co改造研修(河野)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原) 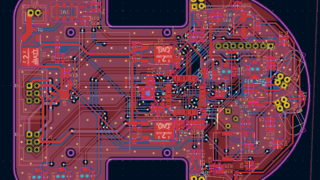 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修