 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) IMU(ジャイロ・加速度センサ)との通信(ICM-42688-P) ? 100日後に完走するマウス【283日目】 Part.9
はじめにお久しぶりです。倉澤ズズくんです。前回は距離センサについて扱いました。今回はIMUについて触れます。センサ類の実験としては最後になります。IMUの概要IMUとは、慣性センサのユニットです。角速度(回転角の速度)を計測するジャイロセン...
 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  マイクロマウスPi:Co改造研修(河野)
マイクロマウスPi:Co改造研修(河野)  Pi:Co V2 体験記
Pi:Co V2 体験記  技術情報・開発日誌
技術情報・開発日誌 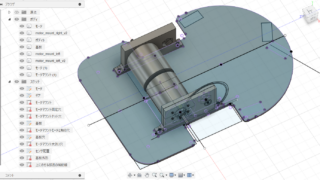 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) 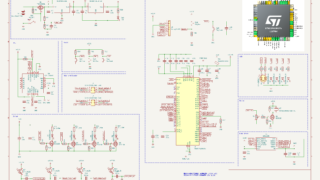 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  ラズパイマウスでROS 2を動かしてみた
ラズパイマウスでROS 2を動かしてみた 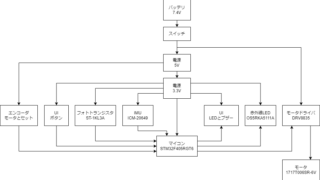 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修