 マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本) KICAD_PCBレイアウトエディタ_基本操作_基板・配線
こんにちわ、岩本です。本日も前回に引き続き、PCBレイアウトエディタの基本操作の備忘録を載せていきます。基板枠設定部品がロード出来たらまず基板枠を先に決めます。(決まってない場合は後でもいいです。)基板枠はレイヤをEdge.Cutsに変更し...
 マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本)  しゅうの自作マウス研修
しゅうの自作マウス研修  YUUKIの自作マウス作製記
YUUKIの自作マウス作製記  HM-StarterKitでマイクロマウスを始めよう
HM-StarterKitでマイクロマウスを始めよう  マイクロマウス研修?お掃除マウス編?(岩本)
マイクロマウス研修?お掃除マウス編?(岩本) 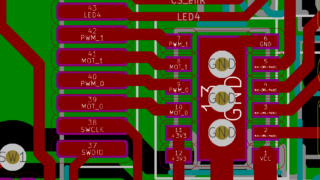 ショウのマイクロマウス研修
ショウのマイクロマウス研修  マイクロマウス研修(鍬形)
マイクロマウス研修(鍬形)  YUUKIの自作マウス作製記
YUUKIの自作マウス作製記  HM-StarterKitでマイクロマウスを始めよう
HM-StarterKitでマイクロマウスを始めよう  技術情報・開発日誌
技術情報・開発日誌