
こんにちはショウです。前回、研修要件である大会完走をしたのでこれまでの内容を振り返って行きたいと思います。
制御の組み直しなどもやっていたので気づいたら2年かかってしまいました。
2年間でやっていたことを振り返っていきます。
デバイスドライバ作成
最初の頃はそれまで使っていなかったSTMマイコンの操作に慣れることと、作成予定の機体のデバイスドライバになる部分の作成をNucleoボードを使用して行っていました。
この段階でマウス特有のセンサの処理部分などの設定以外のデバイスドライバはすべて作成できました。
ここで作成したデバイスドライバがなかったら2020年度のマイクロマウスオンライン大会には間に合わなかったと思います。(機体完成が大会動画提出締め切りの週の月曜)
他にもFlashの部分では致命的なミスをやらかしていて(Part14)、実際に機体で実装テストをしていたら取返しがつかなかったかもしれません。
ちゃんと実機を作る前に評価ボードなどを使ってテストをしておくことの大切さを痛感しました。
STMマイコンの操作関連は仕事でもしっかり役に立っています。
部品選定(RoHS対応)
次にやっていたことは部品選定です。
マウスの経験があったため、マイコンなど部品の半分くらいは最初の時点で決定していましたが、今回の研修では実際の製品開発の時を想定して、RoHSについても考慮して選定を行いました。
RoHSというのは電子機器等に使われる有害物質に対する規制で、鉛などの有害物質の量を制限しています。国内ではRoHS対応していない部品も使えるらしいのですが、海外向けなどの場合には適応されるようです。
Digikeyなどを使っているとRoHS対応の表記があり、ここを見ればそれで十分なのだと思っていました。
しかし、社内で教えて頂いた話で電子部品を搭載する製品の場合電子部品だけでなく、一緒に使用している機械部品や梱包、接着剤にもRoHSが適応され、電子部品以外の部分で引っかかる場合があるということ知りました。
今回は研修だったので、機械部品などの成分表まではすべてチェックしていませんが、RoHSの範囲が想定していた以上に広いということを知ることができました。今後製品を作成する際には電子部品以外についても調べないとRoHSに引っかかるということを知れてよかったです。
基板、メカ部分作成
ここに関しては学生時代からマウスを作っていたのである程度知っている部分でしたが、学生の時は考え方が甘かった配線の引き方や配線の太さなどに注意して引くようになりました。
他には、基板実装の外注を初めて行いました。(Part24)
ホットプレートを使った実装をずっとしていたので初めて外注を行ったのですが、意外と簡単に発注できることが知れたのでよかったです。ただ、実装を外注すると基板だけよりもかなり到着まで時間がかかる点は注意が必要だなと思いました。
今後も使えるタイミングでは外注していきたいと思います。自分で実装するとはんだ不良の確認が大変なので…
ハード的なミスとしてはせっかく外注した基板をエンコーダ基板の位置ミスで使えなかったことです。(Part25)
これのせいでもう一回基板の作成や、実装(今度は自分で)をする必要がでてきたので、一度試作を3Dプリンタなどで行っておけばよかったと後悔しました。
走行制御
ここあたりから2年目に行った作業になってきます。
学生時代のマウスは先輩のコードに付け足しを繰り返して走行制御系を書いていたのでスパゲッティコードになっていて、理論もあいまいな状態で動作していました。
そのためここで、一気に走行制御系を組み替えることにしました。
ちょうどそのタイミングでのりさんが力学モデル制御の記事を書いてくれていたので、これをベースに作成しました。(Part30)
実際には私の機体は4輪でのりさんの機体は2輪だったので、摩擦周りが結構大きく影響していて摩擦をかなり時間をかけてログを取って値を決めました。
その結果それなりに制御がきれいになったのではないかと思います。
ただ、摩擦を推定している値を使っている関係上路面変化には弱いという点は弱点になってしまいますが、そこはフィードバックに頑張ってもらうということであきらめています。
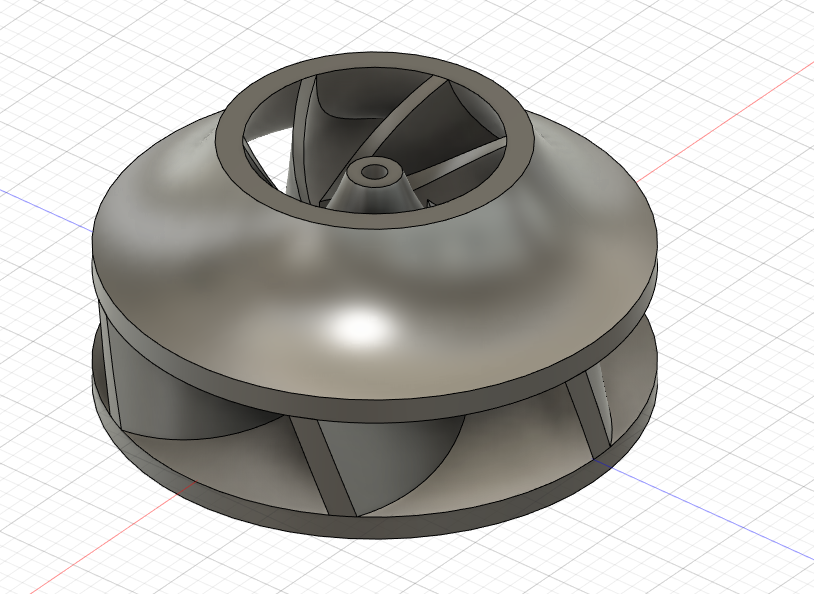
吸引ファン
吸引ファンはかなりこだわって作成しました。大会でみる機体のほとんどは簡易的な形状のファンを使っていて、もっと吸引効率のいいファンがあるのではないかと考えて吸引ファン形状を作成しました。(Part32)
実際にいくつかのファンを作成してテストしてみたところ、形状による吸引効率の向上ができるということが確認できたので、自分としては満足のいく結果でした。(Part33)
最終的に時間が足りず、テスト以外のファンで効率が少し上がりそうなものが作成できなかったのは少し心残りです。
全日本マイクロマウス大会
最初のブログで目標にしていた32×32の完走です。こちらは前回書いた通り全日本マイクロマウス大会で完走することができました。結果は20人中11位だったのでまずまずというところだと思います。
今年度の迷路は32×32にしては簡単な迷路だったので完走できましたが、今の機体では来年以降の迷路に対応できない可能性が高いので、もっと調整をしていきたいと思います。
まとめ
メインの目標にしていた32×32の迷路の完走もでき、他にも使ってこなかったSTMマイコンの使い方、RoHSの知識、制御の考え方の修正など抜けていた部分の穴埋めができたと思います。
学生時代にもマイクロマウスをやっていたので、マウスの作成自体はそれほど新しいことだらけというわけではありませんが、Nucleoを使ってテストをしてからの開発や基板外注、走行制御などの部分で新しい知見を得ることができました。
他にもRoHSなどの今まで気にしないで作っていた部分に自分の想定していないような部分で違反になることを知れたことも大きかったと思います。
マイクロマウスを自作することによってハードウェアからソフトウェアまで一通り自分で体験していくことができるので非常にいい経験になるなと改めて思いました。数年マウスをやっていても新たな発見や、やってみたいことが出てくるので非常に楽しく開発を続けられています。今回の機体でもやり残したことはいくつかあるので、今後も大会には出場していこうと思っています。
これで私のマウス研修は修了になります。
読んでくださった方ありがとうございました。