

徐々にマウスに時間が割けだしたので
台形駆動スラロームについての研究を開始したのですが
その過程で、等速円運動の最初で少しずつウェイトを掛けて
徐々に速度が上がる様にしたところ、これだけでかなりの安定性が獲得出来たので
完全な台形駆動にする前に、こちらで調整してみようと思います。
それと並行して
まだ数値調整をしていませんが電圧判定による走行用変数の加減を先に仮実装しました。
社内大会時にTeraTermで電圧確認をしていたので
サンプルプログラムから電圧をどこで見てるか確認し、それをそのまま制御文に入れて
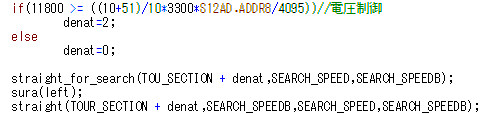
11800mV以下になると、少しだけ曲がる時の距離が増える
という流れのものを作りましたが、まだ実際の調整をしてないので
今後バッテリーを確認しながら最適な数値を探っていこうと思います。