

こんにちは、しおたにです。
1/27(月)に社内マイクロマウス大会が開かれました。
果たして結果は…
その前に、大会に向けいくつか追加した機能を紹介します。
・壁有判定状況を可視化
Pi:Coの前方上部にあるインジケータ(LED)4つを使って各センサが判定している壁の有無の状況を可視化しました。
走行中の判定状況が分かるので、おかしな挙動をしたときに壁の誤判定によるものかどうか分かるようになりました。
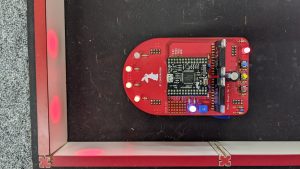
両端は左右の壁、真ん中2つは前方の壁の判定状況を示しています。(画像は左壁と前壁があると判定している)
・旋回モードを可聴化
前回、スラローム開始時に前壁との距離によって旋回半径を変えるようにしました。
旋回半径の修正はパッと見だと分からないため、ビープ音を設定し、旋回時に高い音が鳴れば通常の旋回、低い音だと半径を小さくした旋回となっています。
前壁との距離設定は照明条件に左右され結構シビアなので、可聴化によってデバックの効率がかなり上がりました。
↓前回の動画(旋回時の音に注目)
・袋小路での位置補正
前壁との距離が測れるようになったので、袋小路で停止する際に、毎回同じ距離で停止するようにしました。その後、90度旋回し横壁に後ろあてをして角度を直し、袋小路の中心まで進んでから戻るようにしています。
これで袋小路が何個来ても大丈夫!
↓袋小路で補正する様子
今回はここまで。
社内大会の結果は…次回!