 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作 MA-KING MEVIUS開発記録 – 4足歩行ロボット MEVIUS製作 Part.6
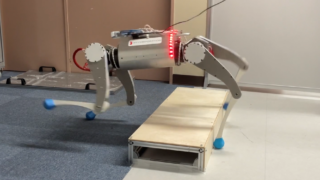
はじめに東京科学大学の福田です。現在チームMA-KINGにて、ロボット競技会CoREにおける4足歩行ロボット開発を行っています。本ブログでは、弊チームにおける開発記録と改良の過程について紹介します。 これまでMA-KINGのXアカウントにて...
 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  Pi:Co V2 体験記
Pi:Co V2 体験記  4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  Pi:Co V2 体験記
Pi:Co V2 体験記  技術情報・開発日誌
技術情報・開発日誌  4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作  ラズパイマウスでROS 2を動かしてみた
ラズパイマウスでROS 2を動かしてみた  Pi:Co V2 体験記
Pi:Co V2 体験記