
今年が終わってしまう!
こんにちは、広報DTP担当のサナエです。
このブログは技術畑ではない広報がアールティの新製品Pi:Co V2と仲良くなり、その魅力をアピールする体験記です。
前回は4区画前進してターンして戻るということをやってみました。
壁制御のことをすっかり忘れてそのままターンして戻ろうとしたために、センサが健気に働いて調整しようとしてお尻をぶつけてしまいました。con_wall大事…
大事そうなところを見なかったことにするのはいけなかったです。今回はできるだけ調整していきたいと思います。頑張るー!

もっと見てほしい!

Pi:Co V2(ピーコブイツー)は、アールティの教育や研究開発用小型移動ロボットのプラットフォームであるPi:Co Classic3同様、ソフトウェア開発の基礎を学びたい方に手に取っていただきたいロボットです。Pi:Co Classic3の機能やデザインイメージをそのままに、半分のマイクロマウスサイズになりました。
マイクロマウス競技に準拠しているのでもちろん大会参加もできます。
Pi:Co V2はESP32-S3マイコンを搭載しており、Arduinoで開発できます。
移動型ロボットのビギナーや、研究者、開発者まで幅広い方々にご利用いただけるロボットです。
Arduinoサンプルスケッチと解説書が付属するので、プログラミング初心者にもおすすめです。

最後のstep
step7が終わって、残るはstep8ですよ。これは迷路走行の必要なもの全部乗せなサンプルです。
左手法、足立法、最短走行がそろっています。そしてstep7が終わってすぐにマイクロマウス東日本地区大会があるということで今回のお題は「東日本地区大会で完走する」デスネ!
マジですか大丈夫ですかワタクシ!?
プログラム系はさっぱりですが調整するのは大好きなワタクシなので、できればすっきり集中して取り組みたい!ならば気合を入れてほかの業務を終わらせてから…アババババ!!終わらない!さすが師走、どんどん業務が追いかけてくるけど何とか集中して調整できる状態になったのでやるぜやるぜ!
step8を見てみると、色々と細かくタブがわかれていてどこにどんなプログラムが入っているかがわかります。マニュアルにもどこに何が入っている、という一覧があるので個人的に嬉しい…
昔は「たぶんこういうのが入ってる場所」くらいの感覚で見ていたので改めてわかると嬉しいです。
タブの位置も変えられるので、調整の時によく触るタブをちょいちょいと集めたりして準備万端!
ここで今度新しく追加される機能があるので使ってみてレビューしつつ調整をすることになってなんだかドキドキですよ!
新しい機能
新しい機能というのはWebServerです。「webブラウザを使ってパラメータを書き込むことができる」というものです。なのでPCでもタブレットでもスマホでも、ブラウザを開くことができるものがあれば手軽に調整できるようになる、とてもナイス機能なのですよ!
Wi-Fiを使うのでWi-Fi環境のある所ではPCから、Wi-Fi環境がないところではPi:Co V2そのものがアクセスポイントになるので安心です。Pi:Co V2が複数台いる場合はちゃんと自分専用のSSIDを作ることができるので大丈夫! 実はここが最初に気になったところだったんですが、すんなり解決できてほっとしました。ヒャッホウ!
![]()
設定のわからないところは遠慮なくレビューという名のもとに聞いて何とか準備できました。
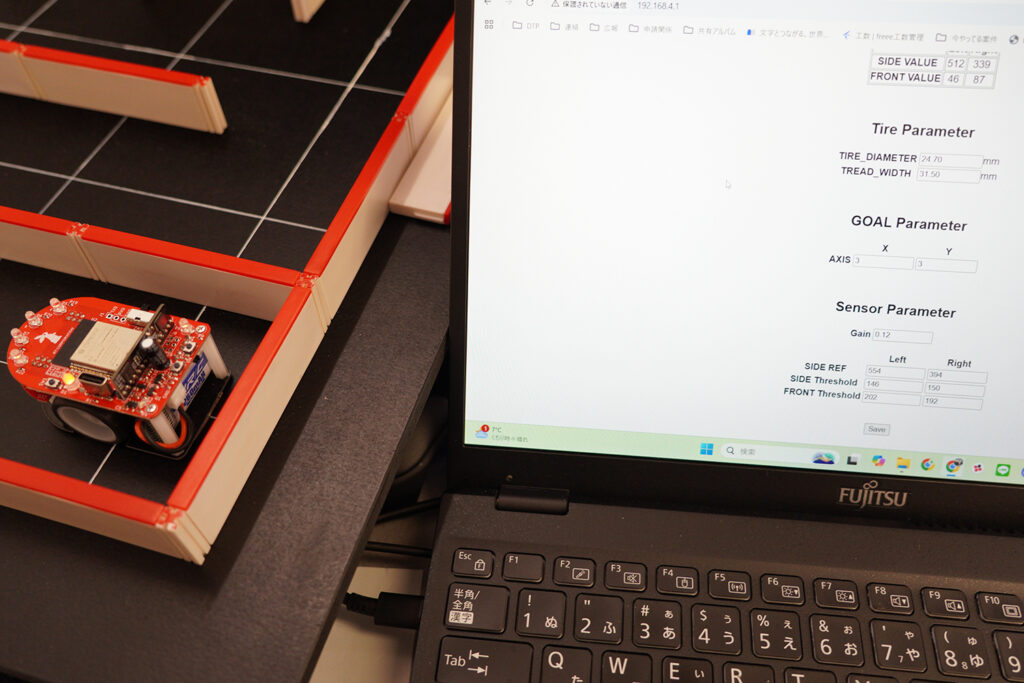
Pi:Co V2の調整モードに入った後、この画面だけでバッテリー残量の確認、センサ値やTire Diameter、Tread width、ゴール座標、ゲイン値、センサパラメータの入力ができます。ケーブルなしボタン一つでピッと入力ができるのでこれは激しくラクチンです!
その他加速度や速度など他の個所を変えたりするときはいつも通りにArduinoから検証して書込みだけど、これは大変時短になるかと思います。アリガタイ…アリガタイ
次のマニュアル更新の時に公開するということなので、ぜひ使ってみていただきたい機能です。
ねちねち調整するよ!!
センサ角度もチェックして、会社のフル迷路を借りて直線距離の調整をして、回転の角度を調整しますよ!直線距離の調整は今まで見た目だけでねちねち数値を変えていいとこを探していたんですが、計算式あるんだから使おうよ!と言われてヒィン!計算が!嫌いなのですアワワワワ!
スプレッドシート(文明の利器)に計算式入れて出た数値を入力しつつ、そこから大好きなねちねちタイムを追加して…こんなもんかな?
回転のほうは…90度を8回じゃ到底足りぬわ!と回転数のところをいじって80回に。20回転ですね。
もう少し回してもよかったかなぁと思いつつねちねちよさげな値を探しました。
 センサの値も取ってブラウザからピッと入力してどうかな?
センサの値も取ってブラウザからピッと入力してどうかな?
うおおおおとりあえず走れたぞ!!!!テンション上がる!!!
欲が出てきた!
会社のフル迷路で走らせていると、なんていうか…デフォルトより早くしたいよね…マウス競技は速さを競うんだもんね…とふつふつ欲が出てきました。加速度をちょっと上げてみたり、止まった後の動き出しを少し早くしてみたり最高速をちょっと上げてみたりしちゃったりなんかして!
かえってそちらの方が安定した走りをしてくれたので欲張りたいけど欲張らない、今回の目標はとにかくゴールすることなのでもうちょっと触りたいなぁー!というところで我慢。
ただ、以前からやってみたかった最短走行の時に少し早くするときのやり方だけはQくんに教えてもらいました。関数に引数を増やして、メインプログラムのcase3以降を作ったときに引数に値を代入するということ。今回のPi:Co V2を触るようになって色々皆から教えてもらったことで、以前は意味が解らなかったことだったけど今回あ、なるほど!と思えるようになったのが嬉しかったです。
聞かずに自分で思いつけば一番いいのだけど、ちょっとだけ進歩したということでヨシ!
本番イブだーーー!
16×16を走れるようになったのが東日本地区大会試走会の前日だったのでひやひやしながら試走会場へ。
迷路ベースの状態も違うし明るさも違うし!当日の会場に置いてある迷路でトッププレイヤーに混じりながらちょいちょい調整させてもらいました。初めてのマイクロマウスサイズなのにすごい人たちの中にちょっとごめんなさいね、と入っていくのは少々勇気と図々しさが必要でしたが、オバチャンダカラ!オバチャンダカラ!と自分に言い聞かせ…とりあえず走れる感じにして我慢我慢!
これ以上はやめておこう…

マウサーの方たちにはいまさら感があるけど一応顔にぼかしを入れてみました。
本番だーー!!
東日本地区大会当日、むっちゃ不安です。
会場ごとにセンサ値がだいぶ違うから!朝と夜ではだいぶ変わるから!ちゃんとセンサ値取らなきゃ!というのを散々聞いたり話したりしてたものの、前日にやった部屋の迷路はもう使えないし!触りだすともう気になっちゃうし!はわわわわ!もしこれで失敗したら来年にブログ持ち越し?来シーズン始まるまでずっとキャンプですか戦力外通告はありますか!?
センサは多分あまり前日と変わらないと思う?、という弊社S君の言葉を信じてもう触らない!と決めた!
出走順は3番目です。ああ早く終わらせたい!でもゴールしてから終わりたい!
とりあえず小さいボタンを押し損ねてスタートのセンサを切ることはしないように気を付けよう…
助けてママーン!!!!
ゴールできた!できたよぉおおおおお!!帰りに引っかかったけど!!!
ゴールできたからとりあえずは最短経路がわかっているので最短走行もちょっぴりできました。帰り似たようなところで引っかかったけど!多分センサ値をもうちょい詰められたんだろうなとちょっぴりグギギ…!!
欲にまみれたい!
早い時間に終わったのであとは心安らかに広報写真を撮りまくります。他の人のPi:Co V2の動きを見つつ、あそこをもうちょっと触ったらよかったかな…とか試してみたいなと思うのが楽しいですね。
次はもう少し安定した走りをしたいと勢い余って言っちゃいました。
というかすでに全国大会にも顔を出すことが決まっている様子。はわわわ!あと少し頑張ってみようかな?
このPi:Co V2のブログのために社内の色んな人に教えてもらって本当に勉強になりました。
まだ聞く予定なのでもう少し付き合ってもらおうかなと思っています。
まだまだヨロシク!
Pi:Co V2は2024年6月25日に販売開始しました。
組込みや自律制御の基本要素を学ぶ方々はぜひ本製品をご利用ください。
Web shopにて、定価60,000円(税込)で絶賛発売中です。ご利用をお待ちしております!