

こんにちは、shotaです。
社員研修として、オリジナルマウスを製作しています。
[前回の記事]では、全日本大会の出場権を獲得したことを書きました。
今回は全日本大会に出場し、どんな走りをしたのかを書きます。
第40回全日本マイクロマウス大会に出場
11/30, 12/1に東京工芸大学で開催された第40回全日本マイクロマウス大会に出場しました。

11/30は試走会とマウスパーティがありました。
試走会では、自分のマウスが迷路を走れるように調整します。
大会に出場するEspecial
調整が終わったらマウスパーティです。

マウスパーティ会場の様子
他の選手と交流して、士気を高めます。

士気を高めるための日本酒
士気を高めます。

士気を高めるお酒
田代杯です。
パーティ会場でもマイクロマウスを走らせています。

田代杯2019の迷路
パーティ後は宿へ向かいます。
温泉もあるいい旅館です。

七沢荘の送迎バス
温泉宿に到着しました。

七沢荘に到着
宇宙のエネルギーをもらって完走を目指します。

宇宙のエネルギーが見えるでしょう?
大会本番
翌日12/1が大会本番です!
再び東京工芸大学に到着です。
会場の東京工芸大学
私が出場するマイクロマウス競技はこのような迷路でした。
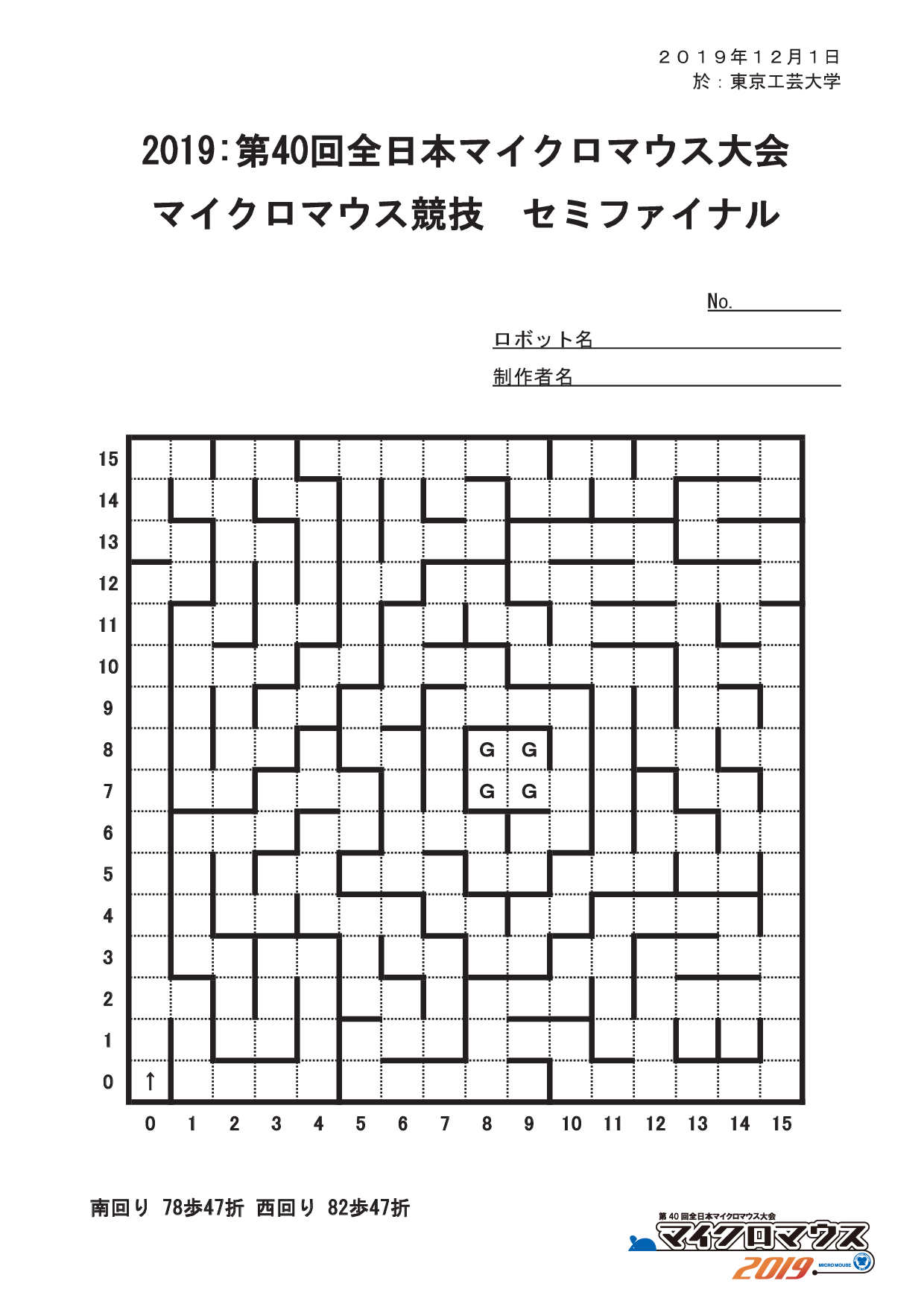
http://www.ntf.or.jp/mouse/micromouse2019/result/maze_ms.png
結果はこうでした。

無事ゴールできたので、まずは自分におめでとうです。
本大会で挑戦したこと
本大会では、地区大会でできなかったスラローム走行に挑戦しました。
しかし、練習時からスラローム探索走行は不安定でした。
練習迷路でずっと調整してましたがなかなかゴールまでたどり着きません。
安定に走るために追加したのがこちらです。
どちらも尻当てによる姿勢調整なので、探索時間は長くなりますが、安定性は向上します。
この機能を追加したことで、練習迷路でゴールにたどり着きました。
本大会の反省点
スラローム走行が成功しなかったので反省です。
練習時も、連続した曲がり角があると走行の誤差が溜まっていき、壁にぶつかっていました。
根本的に制御の見直しや、姿勢調整の機能追加が必要です。
最後に言えることは
大会中に追加したプログラムは成功しない(付け焼き刃)
です。
(大会中にプログラムを書く別のロボット競技にも参加しているので、その悪い癖が発揮されました)
大会の終わり
大会後は技術交流会が開催され、参加選手が集まります。

恒例のマウス集合写真
初心者上級者関係なく、マウスに付いて語り合います。

私もクラシックマウス競技上位の方に、3Dプリンタパーツの作り方や材料について情報を聞きました。
(マウスを作り直す予定なので)
今後の活動
無事?全国大会の迷路を完走することができたので、マイクロマウス研修は修了です!
が、しかし!私のマウスブログは終わりません。
[一番新しい記事]でやっとマウス本体が完成したのですよ。
プログラムの話を書き終えるまではマウスブログを続けます!