
はじめに
こんにちは、槇原です。前回は自作マウスにどのような機能や性能を持たせるかを決定しました。これをもとに駆動系の設計を行います。
決まっていること
まずは要件定義の方で決めたことのうち駆動系で必要なパラメータをまとめます。
| 項目 | 記号 | 値 | 単位 | 備考 |
|---|---|---|---|---|
| 質量 | m | 25 | g | HM-StarterKit以下の質量にする ここでは最も重いケースを想定して設計する |
| 最大速度 | v_max | 1 | m/s | この値より大きくすること |
| 最大加速度 | a_max | 2 | m/s/s | この値より大きくすること |
| 電源電圧 | Vbat | 3 | V | 1セルLiPoで電圧が落ちてきた時を想定 |
DCモータを1段のギアで減速するためギア比を決定する必要があります。また、タイヤ径についても決定する必要があります。以下に決定したパラメータを示します。
| 項目 | 記号 | 値 | 単位 |
|---|---|---|---|
| ギア比 | n | 3.9 | – |
| タイヤ半径 | r_tiya | 6.1 | mm |
モータとタイヤについてはマイクロマウスでよく利用されているものがアールティで取り扱っているのでこちらを使います。
https://www.rt-shop.jp/index.php?main_page=product_info&products_id=3643
このタイヤの半径は6.1mm
モータは MK06-4.5 https://www.rt-shop.jp/index.php?main_page=product_info&products_id=1254
現在販売終了していますが、互換品が販売されています。
このモータについては、こちらのブログにてトルク定数等を測定されていたのでこの数値を参照して以降の計算をしていきます。
逆起電力定数は0.062 [mV/rpm] トルク定数は0.594 [mNm/A]
ギア比の決定
ギア比を決定するためには所望の特性が実現できる電気的特性になっているか、実際に機体サイズ等の制約に引っかからないかを確認する必要があります。
電気特性
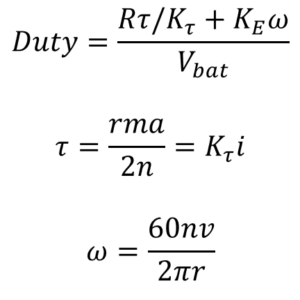
以前のブログでもクラシックマウスで同じ計算をしていますが、今回のマウスに合わせて再度計算していきます。この式から最大速度、最大加速度時のモータのデューティー比、電流値を求めることができます。
利用するパラメータは以下の通りです。
| パラメータ | 値 | 参考 |
| 巻線抵抗R?[Ω] | 4.5 Ω | モータ仕様より |
| トルク定数K_tau?[Nm/A] | 0.594 mNm/A | 参考ブログより |
| 逆起電力定数K_E?[V/min-1] | 0.062 mV/min-1 | 参考ブログより |
| 電源電圧V_bat?[V] | 3.0 V | 1セルLiPo |
| タイヤ半径r?[m] | 6.1 mm | タイヤ径参考値 |
| 機体質量m?[g] | 25 g | 仕様より |
| 速度v?[m/s] | 2 m/s | 仕様より |
| 加速度a?[m/s/s] | 5 m/s/s | 仕様より |
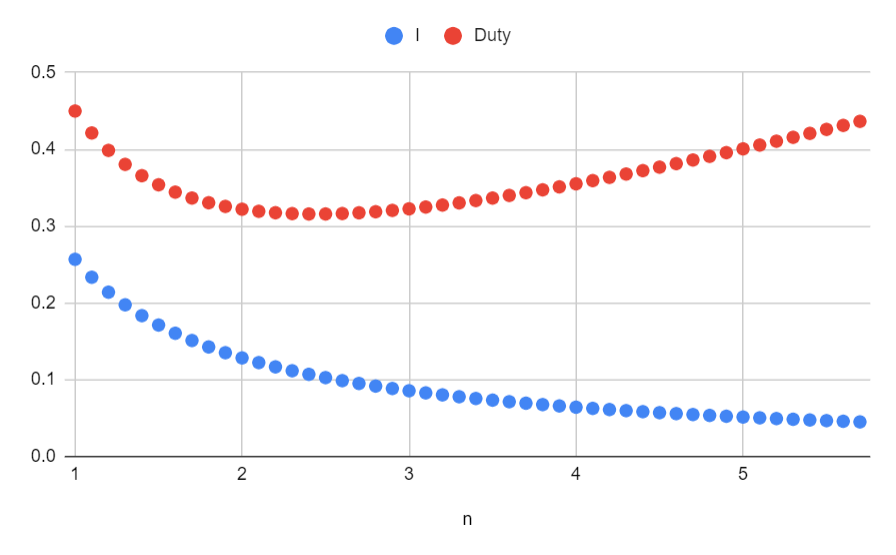
最大速度、加速度、ギア比をパラメータとして振ってみたときのプロットを示します。
横軸はギア比で、指定した速度加速度を出すために必要な電流値[A]とDuty比を縦軸にプロットしています。このプロットを見てどの減速比だとどれくらいの電流を流せばよいか、Dutyに余裕があるのかを確認します。
v_max=2 m/s a_max=2 m/s/s
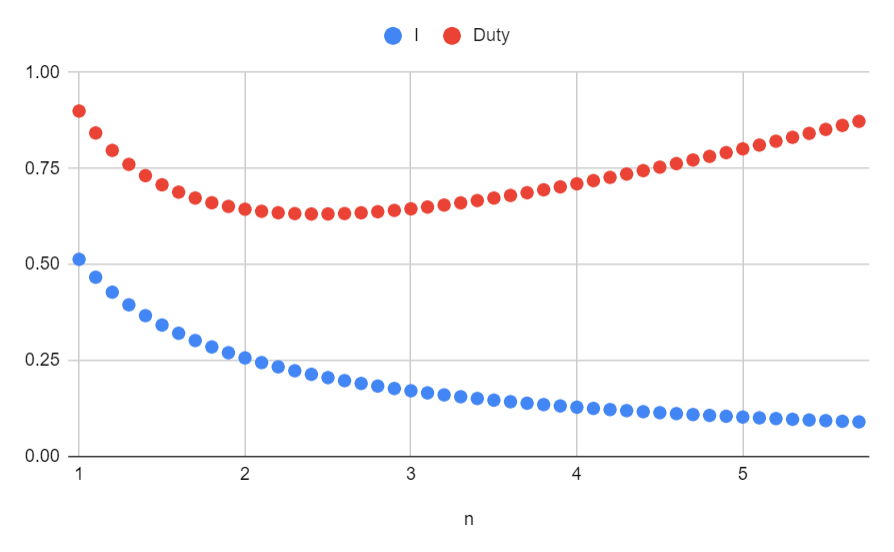
v_max=4 m/s a_max=4 m/s/s
計算結果についてわかることなどを挙げます。
・ギア比1付近、5付近では必要なDutyが大きいため制御入力の余裕がなくなります。
ギア比が1では必要トルクが大きく、5付近ではモータの回転数が増えるので逆起電力が大きくなるので必要なDutyが増えます。
・ギア比2~3付近が、Dutyが最も小さくなる点でした。
ただ、ギア比は高ければ高いほど不確定な摩擦等があった場合にも制御への影響が小さくなるので、その点ではギア比が高いほど良いです。
機械的制約
仕様以外の制約条件としては以下のものが上げれれます
・タイヤ側の歯先円直径はタイヤ径よりも小さい必要がある。
・磁気エンコーダを入れるためモータとエンコーダ(6x6mm)が接触しないような軸間距離にする。
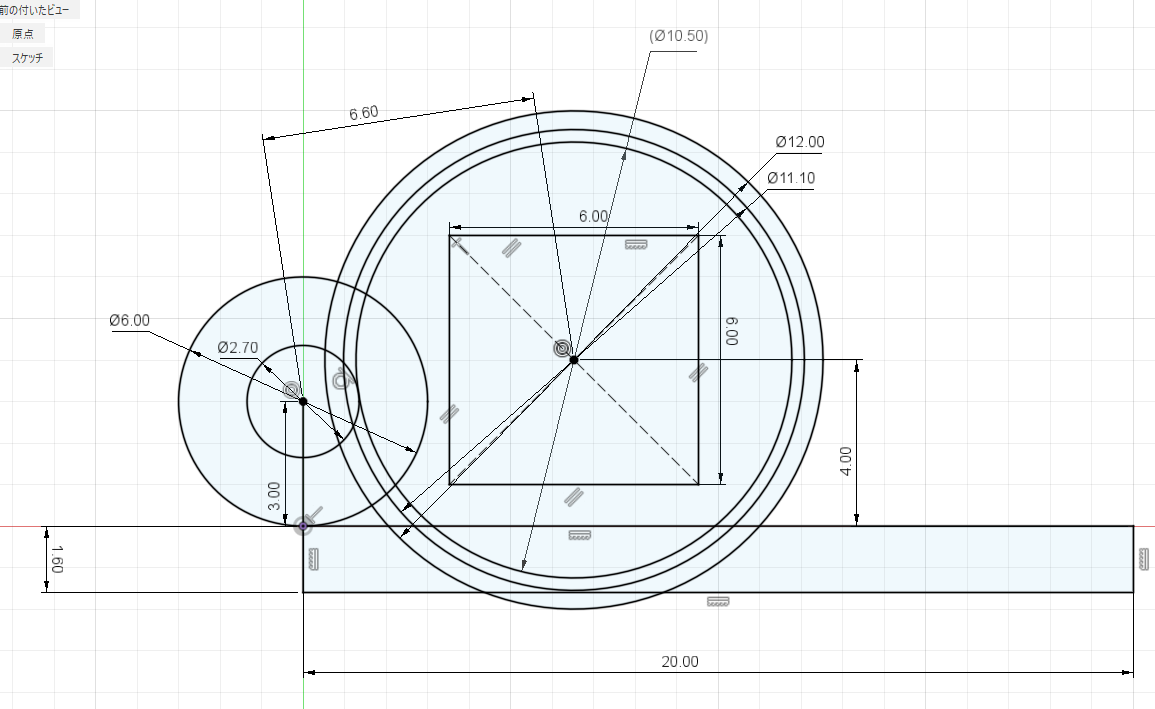
以上を踏まえて、機械的な制約に引っかからず、必要Dutyが大きくなりすぎないようなポイントを狙って次のような歯数、ギア比に決定しました。ギアのモジュールは0.3として計算しています。
ギア比3.9
歯数モータ側9 タイヤ側35
ギア直径 2.7 mm, 10.5 mm
軸間距離6.6 mm (+バックラッシ0.05 mm)
タイヤ側ギア歯先円直径11.1 mm< タイヤ径12 mm
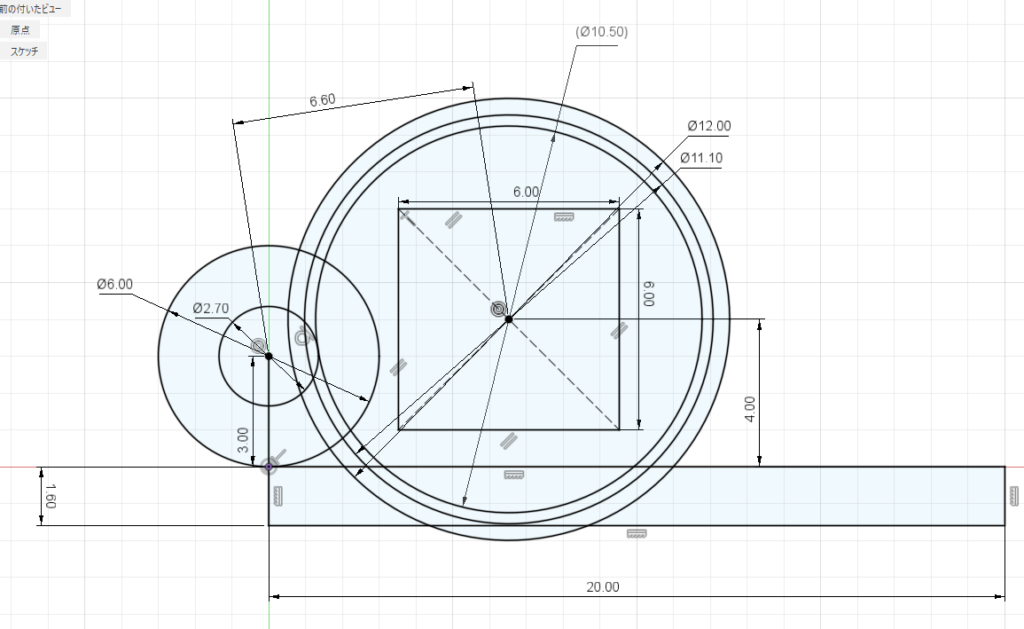
CADに寸法を適応したのが上の図です。大きい円の中心にある四角がエンコーダです。
この設計で進めていきます。次回はモータマウントと磁気エンコーダについて書いていきます。