
ししかわです。
社員研修の一環で、マイクロマウスを自作して大会に出場しました。
全日本大会2020は終わりましたが、ブログはもうちょっとだけ続きます。
今回はセンサやコントローラを統括するマウスクラス(図中赤枠)と制御ループの実装です。
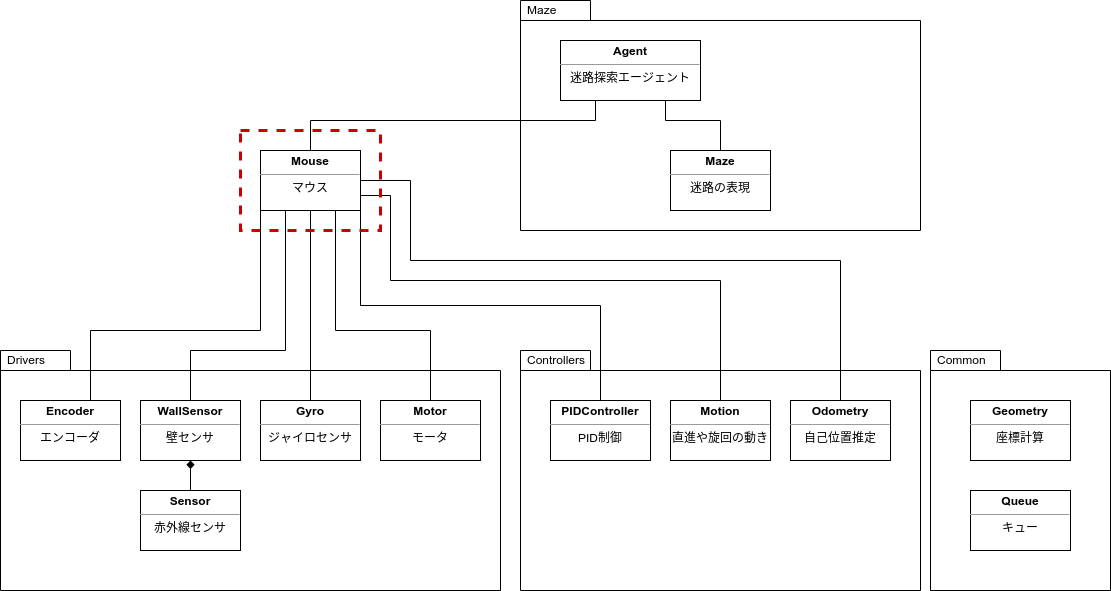
Mouseクラスの実装
Mouseクラスは走行指令を受け付けて、制御ループを通じてマウスを実際に走らせるためのクラスです。
基本的には今まで紹介してきたドライバやコントローラのメソッドを順番に呼び出すだけで、それほど複雑なことはしていません。
マウスの走行時の動作
マウスに走行指令を与えることで走ります。走行指令は「180mm直進」「右に半径90mmで旋回」など、距離と走り方の情報を持ちます。探索走行時は(既知区間加速を除いて)1マスずつ走行指令を与えますが、最短走行の際はスタートからゴールまでの経路をすべて算出してからまとめて走行を与えます。
マウスクラスで複数の走行指令をまとめて実行するために、キューを使って走行指令を格納し、順番に取り出しながら走れるようにします。
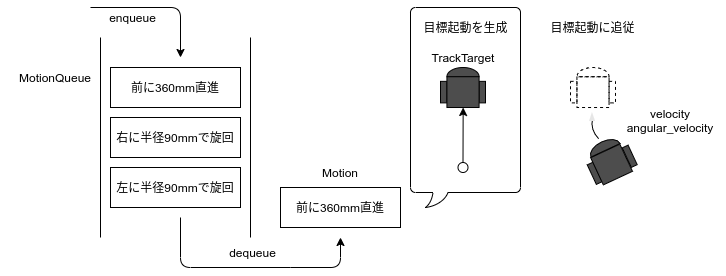
走行指令(Motion)の実装は次のようになっています。走行の種類と目標座標のほか、開始時・終了時の速度が与えられるようになっています。
制御ループの実装
2つの制御ループをタイマー割り込み使って実装しました。
- メインの制御ループ(1kHzで駆動、詳細は後述)
- 赤外線センサの値の読み込み(4kHzで駆動)
制御ループ全体を1kHzで駆動したいですが、このとき問題になるのが赤外線センサです。壁との距離を測るために赤外線LEDをOn/Offしてフォトトランジスタの受光量の差分を用いますが、同時に全てのLEDを切り替えると電流量のピーク値が大きくなり、十分な光量を得られない可能性があります。また、M5Mouseで使っている受光素子(フォトトランジスタ)は指向性が高いとはいえ、LEDを同時に光らせると互いに干渉する可能性もゼロではありません。
そこで赤外線センサのみ別のループで制御し、1回のループでは1つのLEDだけ操作することで、電流量のピークを抑えて干渉を無くします。今回は制御ループの4倍の周波数を持つタイマーで駆動します、こうすると1kHzの制御ループが1周するあいだに、ちょうど4つの赤外線センサの更新ができます。
メインの制御ループ
制御ループ1回分はm5mouse_update関数で行います。次のような流れです。
- 壁の情報を更新する
- m5wallsensor_updateを呼び出す
- マウスの現在の速度を更新する
- 左右の車輪のエンコーダから回転量を取得し、車輪の速度に変換する
- ジャイロセンサから角速度を取得する
- マウスの自己位置(オドメトリ)を更新する
- m5odometry_updateを呼び出す
- 次の目標速度を求める
- 走行指令が終了していてキューが空でなければ、走行指令をキューから取り出す
- 目標速度に近づくようモータを駆動する
- PID制御を使う
- PIDゲインはマウスを実際に走らせながら試行錯誤して決めました。
- PID制御を使う
ここまででファームウェアの説明を一通りしてきました。
ファームウェアのソースコードや回路図、PCBのレイアウトなど、設計情報一式をGitHubのリポジトリで公開しています。

M5Mouse特有のパラメータ等もあるためそのまま使うのは難しいですが、ぜひ参考にしてみてください。