 d-satoのマイクロマウス研修
d-satoのマイクロマウス研修 迷路をスラローム走行 (2) ? d-satoのマイクロマウス研修 Part10
前回は実際にロボットをある程度複雑な迷路内で走行させてみました。実装したスラローム走行で問題なく16x16の迷路を走行させられそうかを確認しておきたいので、今回は追加で2つの形状の4x4迷路について走行させてみます。その前に、前回のPart 9から少し本体に手を加えたので、メモがてら紹介します。
 d-satoのマイクロマウス研修
d-satoのマイクロマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野) 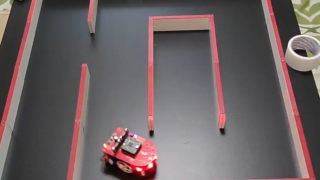 d-satoのマイクロマウス研修
d-satoのマイクロマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野)  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野)  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野)  d-satoのマイクロマウス研修
d-satoのマイクロマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野)