 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) PCBの修正(KiCad7) ? 100日後に完走するマウス【357日目】 Part.15
はじめにこんにちは、倉澤ズズくんです。前回はリフローではんだ付けをしました。はんだ付けによって設計ミスの箇所が分かったところで、今回は以前作成したPCBの修正をします。というのも、現状の機体でも走りますが、現状1台しか走れる機体が残っていな...
 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) 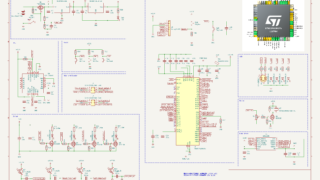 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  はしもとの自作マウス研修
はしもとの自作マウス研修  はしもとの自作マウス研修
はしもとの自作マウス研修  自作マイクロマウス研修 (hayashi)
自作マイクロマウス研修 (hayashi)