

こんにちは、しおたにです。
前回、台形駆動スラロームを実装しました。
以前より滑らかに曲がれるようになりましたが、旋回前後がかなりフラフラしているように見えます。
原因の一つとして、
スラロームの調整不足
が考えられそうです。
曲がった後に壁に近すぎるようなので少し大回りになっているのかもしれません。
調整方法
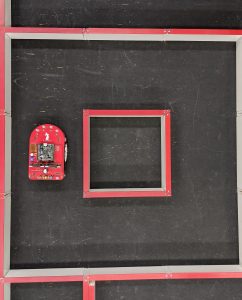
画像のように壁をグルグルとまわり、旋回距離と旋回半径が適切かを見ます。
この際、壁制御はすべて無効にし、旋回前後のズレが残るようにします。
この状態で3周くらい回ってみると…
序盤は良さそうですが途中で旋回距離が足らないのか壁に当たりました。
この後、何度か旋回距離を変えたりしたのですが、再現性のないズレがよく見られたのでタイヤがスリップしているような気がしてきました。
スリップするということは加速度が大きすぎるか速度が速すぎるということ。
旋回速度を遅くしてやりました。すると、
かなり安定するようになりました。
調整後
速度は遅くなりましたが安定性が増したように見えます。
依然としてゴール後に壁に当たるという問題はありますが、スラロームの調整は出来ました。
今回はここまで。