

ししかわです。
今回から、マイクロマウス研修(キット編)を始めていきます。
まずはマウスの組み立てです。
技術部のマイクロマウス研修のゴールは「(回路から作った)自作マウスを使い、マイクロマウスの大会で完走すること」です。
しかし、回路の設計や部品の調達などは、ロボット製作の初心者には敷居が高いです。
そこで、まずは当社製のキットを組み立てて動かすことで、マウスの構成要素やプログラミングについて学習します。
使用するのは「Pi:Co Classic3」という当社製のマイクロマウスキットです。
また、教科書として「マイクロマウスではじめよう ロボットプログラミング入門」を使います。
本書を読み勧めながらPi:Coの実装とプログラミングを進めることで、ロボットプログラミングのエッセンスを効率よく学習できます。
マイクロマウスの教科書。良書です。
最初に基板に部品をはんだ付けしながらキットを組み立てます。
はんだ付けが初めての方も、練習用の基板がついているから安心です。
練習用基板ではんだ付けの練習ができます
…
完成したものがこちらになります!
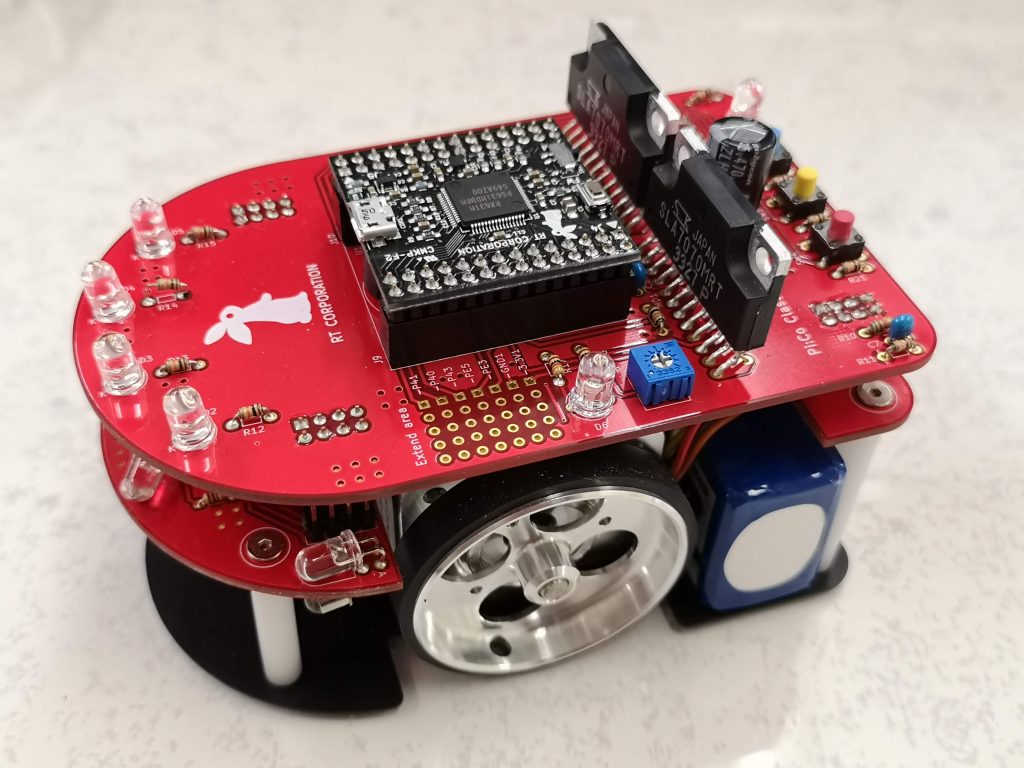
完成したPi:Co Classic3。作業途中の写真は取り忘れました
このPi:Co、実は今販売されているキットと違う点がひとつあって、スルーホール(部品を挿す穴)に金メッキ処理が施されています。基板の腐食を防ぐ効果があるそうです。
はんだ付けは滞りなく完了…と思いきや、スイッチを入れてもCPU基板のLEDが点滅して起動しないというトラブルが。
再度回路図と基板を見比べながらチェックした所、電源基板の三端子レギュレータを逆向きに付けるミスを犯していました。
はんだ吸い取り機を使って、逆向きの部品を抜くまではできましたが、スルーホールがはんだで埋まったままになり再度挿すことができません。
結果、部品は挿さず、ホールの上にはんだを盛って部品の足と接続するという力技で対処しました。
この状態でももちろん電流は流れますが、衝撃に弱く、はんだが根本からポキっと折れてしまう可能性があります。今後の扱いに注意したいところです…
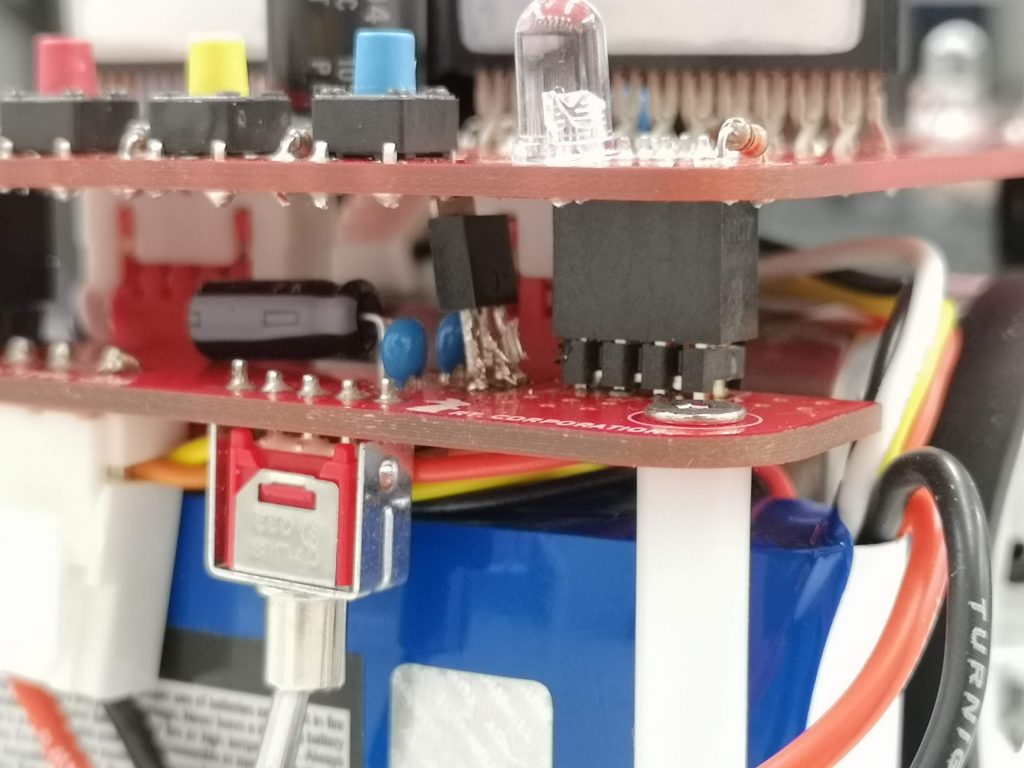
はんだを盛って強引に接続されたかわいそうな三端子レギュレータ(画像中央)
ともあれ、無事に組み立ては完了し、動作確認もできました。
次回からはサンプルプログラムを使いながら、マイコンの制御を学習していきます。