
また夏がやってくる
こんにちは、広報DTP担当のサナエです。
このブログは技術畑ではない広報がアールティのPi:Co V2と1シーズンともに頑張って、もうちょっと一緒に頑張りつつ魅力をアピールしたい体験記第2シーズンです。
前回Pi:Co V2の新しいサンプルプログラムについて書きました。お試しで先行して使っていたwebserver、本当にパラメータ変更がラクチンだったのでうまく使っていきたいです。
皆さんは使ってますか?まだの方はぜひご利用いただきたい!

Pi:Co V2をもっともっと知ってほしい

Pi:Co V2(ピーコブイツー)は、アールティの教育や研究開発用小型移動ロボットのプラットフォームであるPi:Co Classic3同様、ソフトウェア開発の基礎を学びたい方に手に取っていただきたいロボットです。Pi:Co Classic3の機能やデザインイメージをそのままに、半分のマイクロマウスサイズになりました。
マイクロマウス競技に準拠しているのでもちろん大会参加もできます。
Pi:Co V2はESP32-S3マイコンを搭載しており、Arduinoで開発できます。
移動型ロボットのビギナーや、研究者、開発者まで幅広い方々にご利用いただけるロボットです。
Arduinoサンプルスケッチと解説書が付属するので、プログラミング初心者にもおすすめです。

スラロームの前に
早速スラロームを…!というものではないのです。
まずは基本の超信地旋回でより使いやすくするところからですよ!何事もまずは基本が大事かと思われます。
第一シーズンでは色々な個所を書き換えて調整していきましたが、今回はwebserverに対応した速度と加速度が可変にできるように修正していきます。
加速度や速度に複数のパラメータを用意しておきその時の状況を見て選択して、完走率をあげたりタイムの変化を楽しむことができるようにしたい。そしてそれを手軽にできるようにwebserverに変更を加えます。
というわけで研修資料を基にちみちみプログラムを修正していきました。
思ったより多かった!
adjust.ino、fast.ino、fast.h、misc.ino、parameter.h、run.ino、run.h、search.ino、search.h
のファイルに速度と加速度の引数を追加する修正をしていきました。
そのほかにFlash.inoとwebsever.inoも修正する必要がありますが、研修の意図と違うので修正後のファイルをコピーして使用しています。
コピペでは練習にならないという事でちみちみ手打ちで入力…思ったより修正箇所が多いぞ?
加速とー減速とー直進とー、と直していって入力できた!検証ポチー!!我がタイプ能力を見よ!
ゲハー!!!!
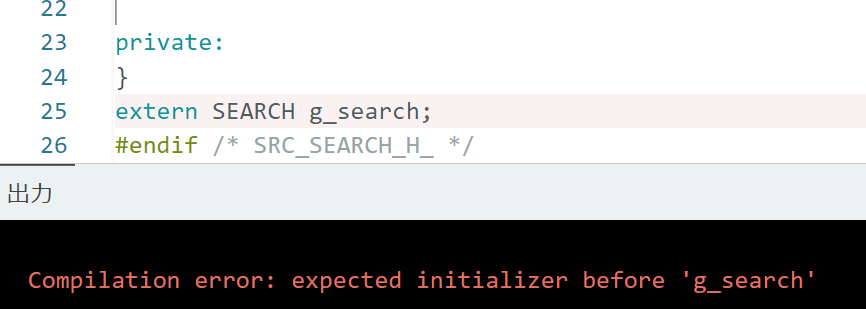 真っ赤なんですけど!?おかしいな?あれれ?赤い文字が大量に…
真っ赤なんですけど!?おかしいな?あれれ?赤い文字が大量に…
何がおかしいかもいまいちわからなくてヒンヒン言ってたらM先生が見てくれて何とか…!
タイピングは大丈夫だったけど、必要なところを消して上書きしちゃってたり;を消しちゃってたり間違い多数でした。タイプ能力以前の問題!!イヤーン!
そしてなんとか検証も無事通り、ヨッシャヨッシャ!あとは調整して走らせる!ハァハァ!
新しいことを知ってしまった!
ところでノートパソコンでちみちみ打っていたんですが、並べて見たい時ってありますよね。
会社の机ではノートとデスクトップで資料を広げながらできるんですが、「ここから!ここまでを!コピぺしたい!……のにPCが違うからできぬ!!!」ってことが結構ありまして、もやもやすることも多々ありました。
まちがいを教えてもらっている時にM先生からMicrosoftのVisual Studio Code(VSCord)を使うと画面内で並べて見つつ、VSで修正したものがArduinoに反映されると聞いて興味津々!
でも今結構時間的に新しいソフト覚える余裕ありませぬよ!あっあっ脳みそのしわが足りてないよ!もったいない…!
と思ったらメモ帳でも同じことができると聞いてこれなら、とやってみました。
フォルダから見たいプログラムを右クリックでメモ帳を開いて…
おおおおお出たでた!ちょこっと改行してみたりして…忘れず保存する、と…
これが
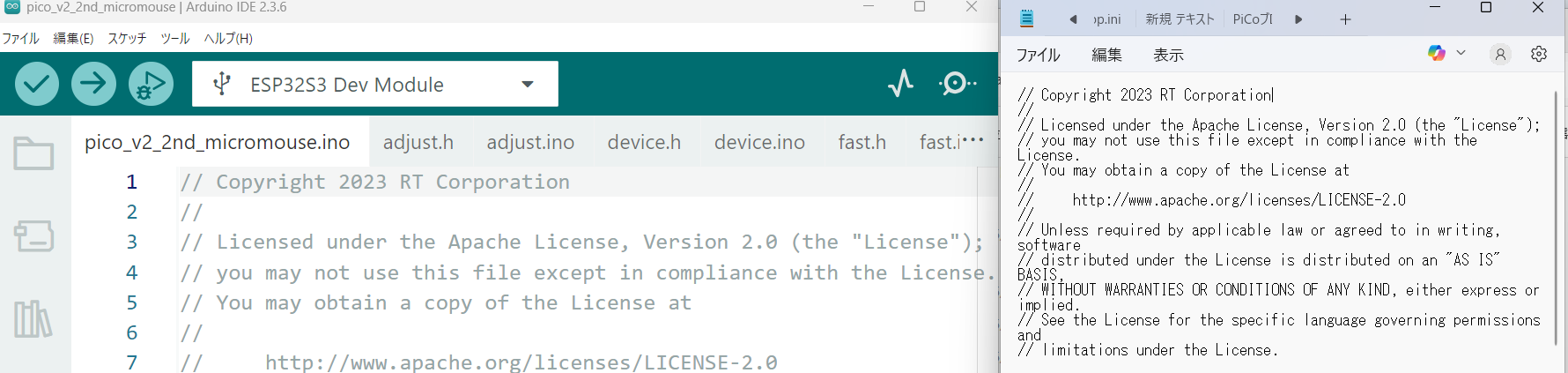
こうじゃ!
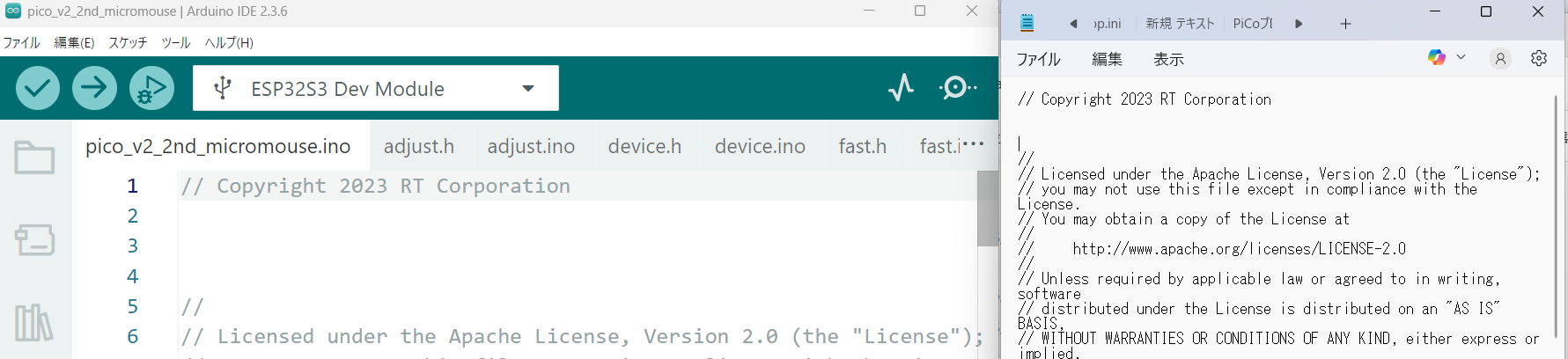
ウェエエエッフウウウウウ!!!グフフ!!!ほんとだ!変わった!嬉しい!!!
これなら!私にも使えそう!新しいことを知ってしまったのでしわが一つ増えました。
活用できるといいな!
閑話休題、いざ実践
新しいことを知ってウキウキ気分で実際に動かします。
さあwebserverカモーン!!新しいデータでやってるから設定からですわ!!
ここはちゃんと覚えているかの見せどころ、SSIDを自分専用に直して?Wi-Fiでつなぐ?
ブラウザに打ち込むときはhttp://ですヨ!https://ではいかんのです!と準備完了!
おおおお!ちゃんと項目が増えてる!!!
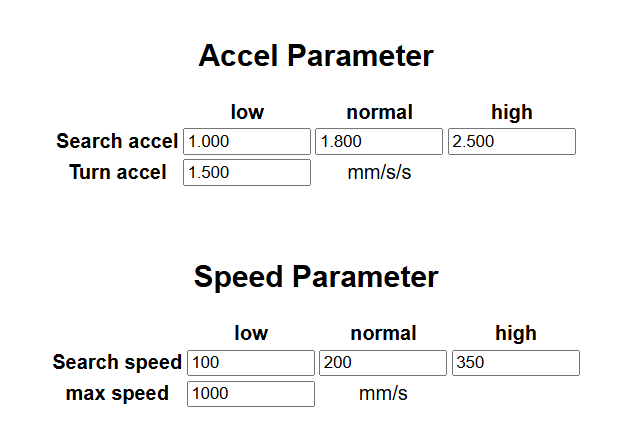 アクセル、スピードパラメータにlow、normal、highが追加されました!
アクセル、スピードパラメータにlow、normal、highが追加されました!
これでそれぞれに値を入力することができます。
まっさらなスペースにざっくりと値を入れて、ちゃんと違いがわかるか楽しみです。
おおおーーちゃんと違いが出てる!いいかんじ!
4×4の小さい迷路なのでさっくり終わってしまいますが、最短はどうかな?
ギュンギュンふらふらしすぎたけど、何とか動作の確認ができました!やったー!
これから少しずつちょうどいいところを探していきたいと思います。
色々変わってた
今までのPi:Coシリーズはメインプログラムでモード選択をしていました。Pi:Co V2だったら「micromouse.ino」となっているところですね。
今回修正しているときにやっと気づいたのですが、今回からタブが細かく分かれてモード選択はmisc.inoで行うことになりました。覚えておかなきゃ!(修正を入れてるときに見ていたのに忘れて探しちゃった)
こうするとメンテや手を入れる時にわかりやすくなるんですね。
次は既知区間加速を入れていきます。そんな素敵なことが私のPi:Co V2でできるようになるのかしらとちょっとドキドキしますが、タブも分かれてわかりやすくなっているのできっと私にもできる…はず。
頑張ります!
走れはしれPi:COチャン!
Pi:Co V2は現在好評発売中です。
組込みや自律制御の基本要素を学ぶ方々はぜひ本製品をご利用ください。
Web shopにて、定価60,000円(税込)です。ご利用をお待ちしております!