
こんにちは、しゅうです。
ハードウェア設計が少しずつ進んでいるので、その様子を書き留めていきます。
基板部分
今回のマウスには車体用の板を用意しないことにします。発注した基板がそのまま車体となります。
少し余裕を持たせたり、参考にしたりして次のような大きさになりました。
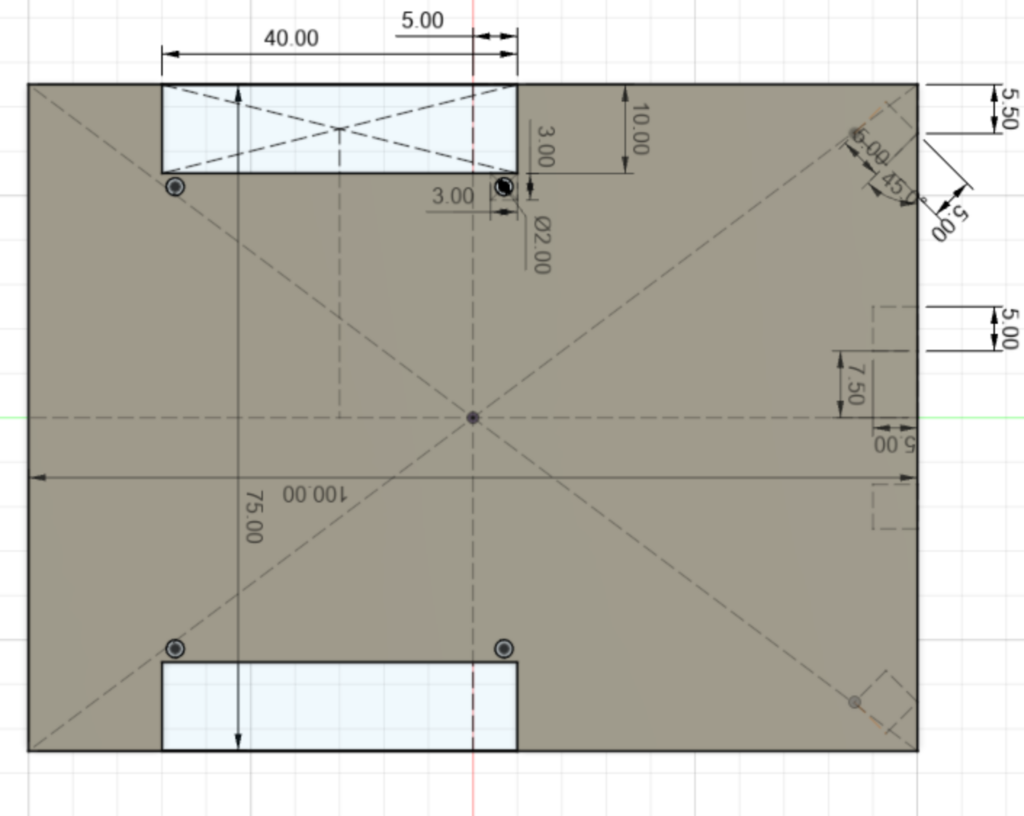
今後細かい調整は発生するかもしれませんが、おおむねこのサイズ感でいきます。
モータマウント
かなり重要なパーツであるモータマウント。モータの固定はもちろん、走るためのタイヤの固定も担っています。
そのために今回は考える要素がいくつかあります。
- 使用するギアの大きさや歯数
- タイヤとホイールの大きさ
- 使用するモータ(決定済み)
- モータと車輪の軸間距離
全て1から考えていくと時間がかなりかかるので、今回は過去の機体やブログを参考にしながら決定していきます。
ひとまず設計し始めたモータマウントがこちらです。
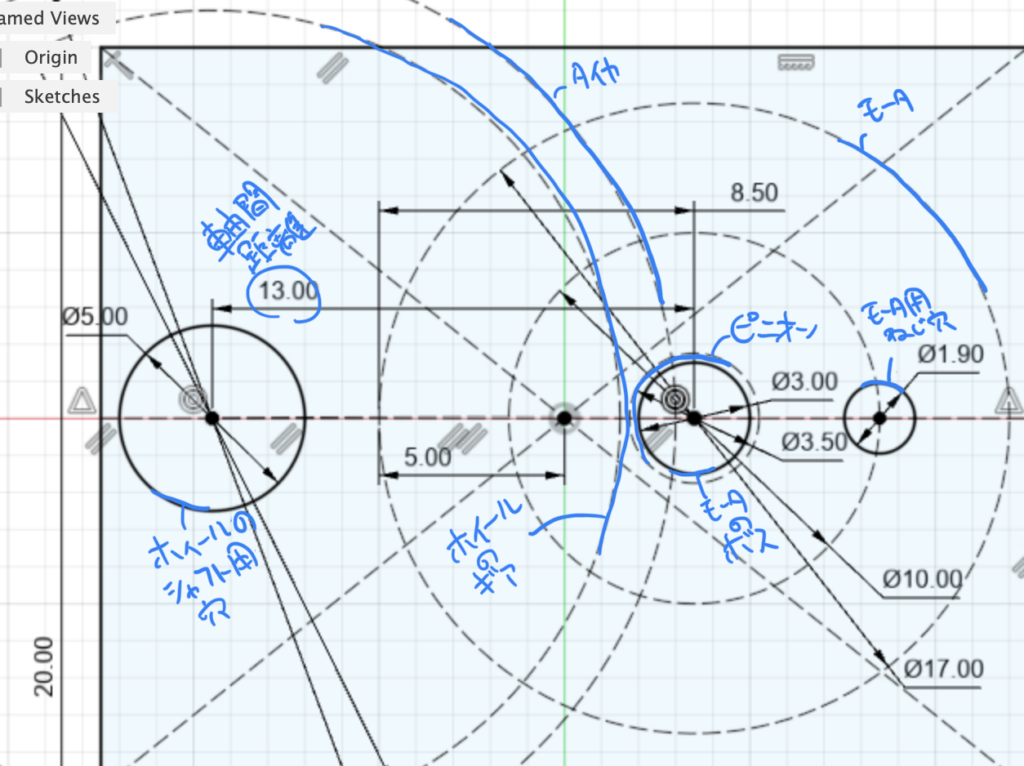
決まっているものとしては、ピニオンギアはモジュールがM0.5・歯数が14・厚さが3mm、です。タイヤとホイールは、マウス競技でよく使われている、直径が25mmほどのミニッツレーサー向けのものを使います。
ここから減速比や軸間距離を決めていきます。
参考ブログや情報まとめ
モータマウントの作成にあたって、以下のブログを参考にしています。
Fusion360でギアの作り方(しおたに)
ギア比の計算について(しおたに)
まとめ
今回は少しでしたが、設計を進めている様子を示しました。
次回は、モータマウントについて、細かい仕様を決めていきます。
次回はPCBレイアウトを行うための準備、フットプリントの割り当てなどを行っていきます。