
鍬形です。社内研修でマイクロマウスやってます。これまでHM-StarterKitやPi:Co Classic3などアールティ自社製品のマイクロマウスキットを動かして遊んでました。
これからは自作マイクロマウスの製作を通してハードとソフト両方をより深く学んでいきます。研修の合格ラインはDCモータを使用したマイクロマウスを作って大会で迷路を完走することです。今回は作りたい機体のイメージと大会出場に向けたスケジュールを立てます。本連載一覧は自作マイクロマウス研修(鍬形)をご覧ください。


作りたい機体を考える
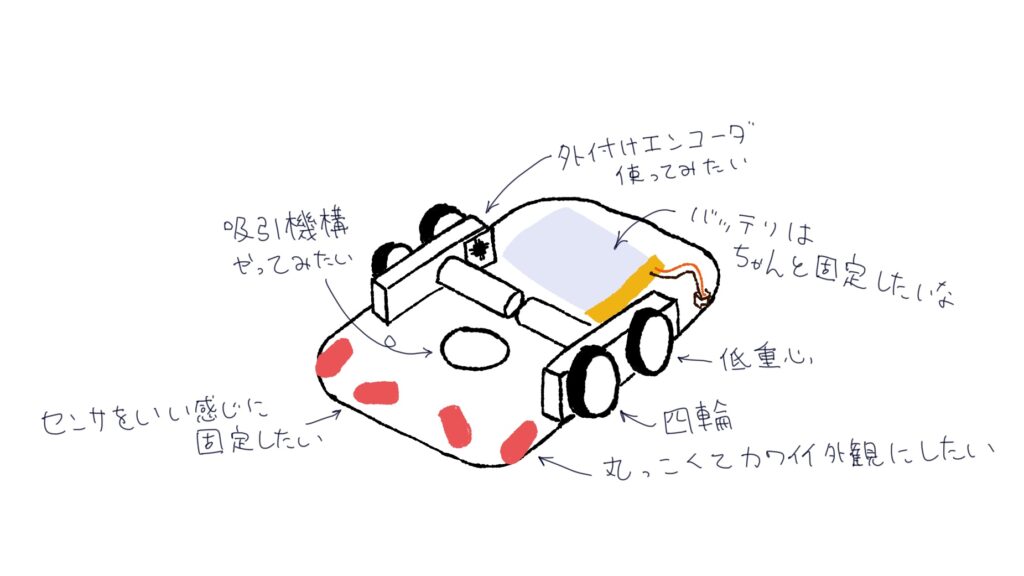
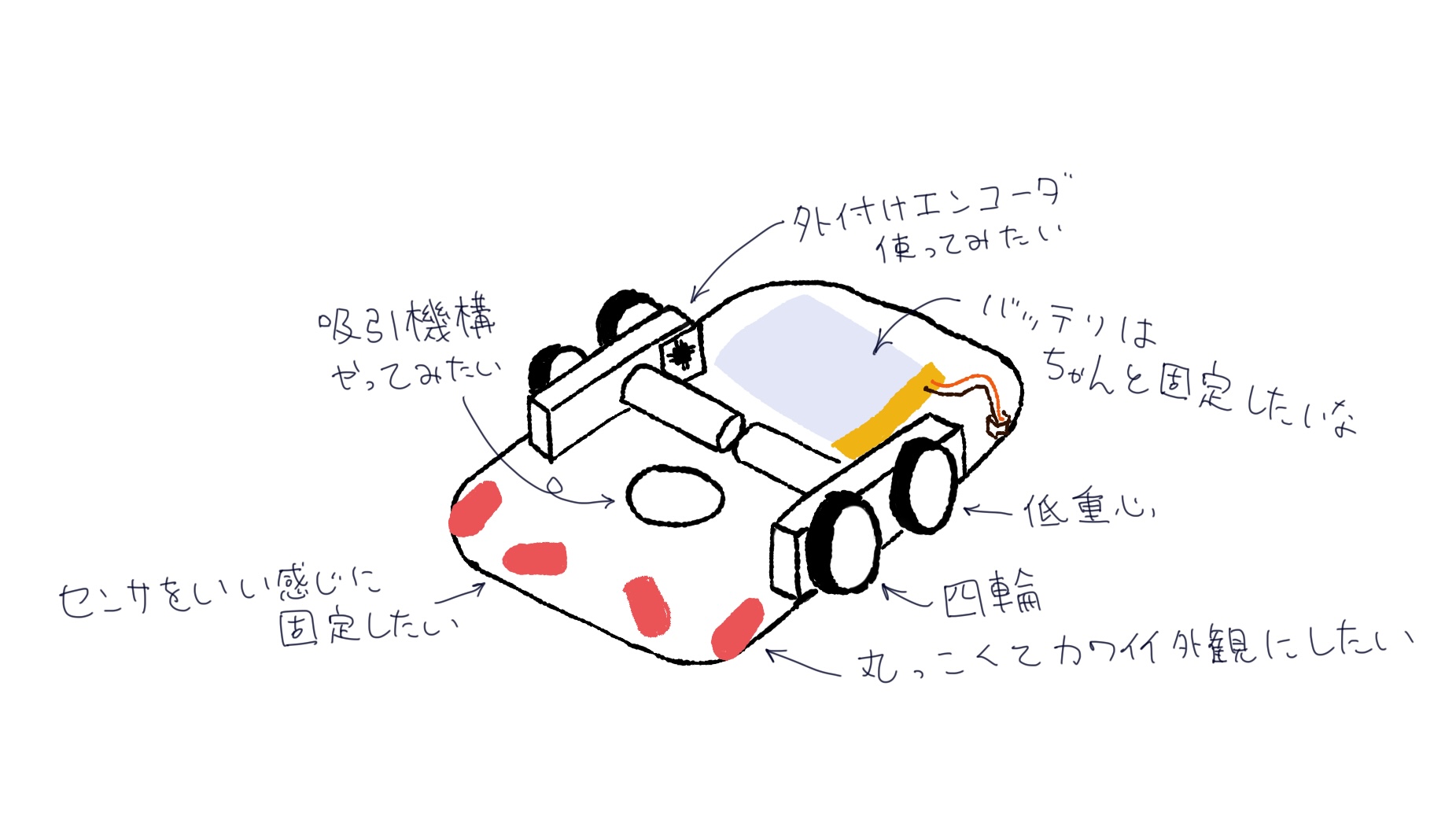
機体の仕様を決めていくためにコンセプトを考えます。標準的な機能にチャレンジ要素を加えてもいいのですが、普通に完走するだけで楽しそうなのでオーソドックスな機体にしたいと思います。コンセプトというほどでもないですが大会動画を見ながらこんな機体にしたいなと思った要素を書き出してみます。
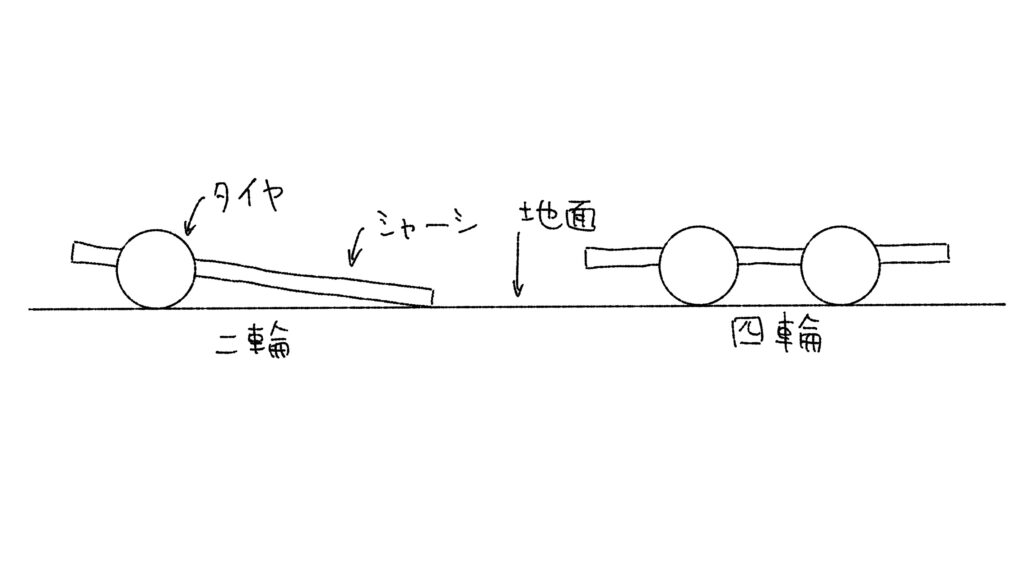
移動機構は四輪スキッドステアにしたいです。四輪スキッドステアとは4つのタイヤの速度を左右別に制御することで前後進と左右旋回を行います。二輪のほうが構成がシンプルなのですが、下記画像のように機体端をキャスター代わりに引きずることになります。四輪なら機体の重量をすべてタイヤで支えるのでスリップしにくくなることが期待できそうです。ちなみに二輪でも前後のバランスを調整することで、引きずっている機体端にかかる重量を減らすことができるので二輪と四輪どちらが良いかは好みによるところが大きいです。
四輪スキッドステアはマイクロマウス参加者の間で変則四輪とよばれることが多いそうです。マイクロマウスに関する用語については下記記事が参考になりました。特徴的な迷路の形状などは一言で言い表しにくいので通称を知っておくと便利です。
参考: それほど間違っていないマイクロマウス用語事典2018年版 | Tokoro’s Tech-Note
エンコーダは1717T003SRのようにモータと一体型になっているものが扱いやすいのですが、学生時代に使ったことがあるので今回は外付けのものを使ってみようと思います。車輪の回転軸に磁石を固定し、回転に応じた磁場の変化を読み取る磁気式エンコーダがマイクロマウスではよく用いられているようです。
あとは使い勝手や見栄えをよくしたいです。競技用に作ったロボットはつい電源ボタンが触りにくい位置にあったりバッテリの収まりが悪かったりするので気を使って設計していきたいと思います。外観は丸っこくてかわいい機体を目指したいです。
スケジュールを考える
まだまだ競技ルールの詳細や必要な作業もわかっていませんがざっくりとしたスケジュールを立てます。過去の大会開催時期を見ると地区大会は夏、全国大会は冬?春くらいの時期に開催されるようなので来年度の大会を目指します。
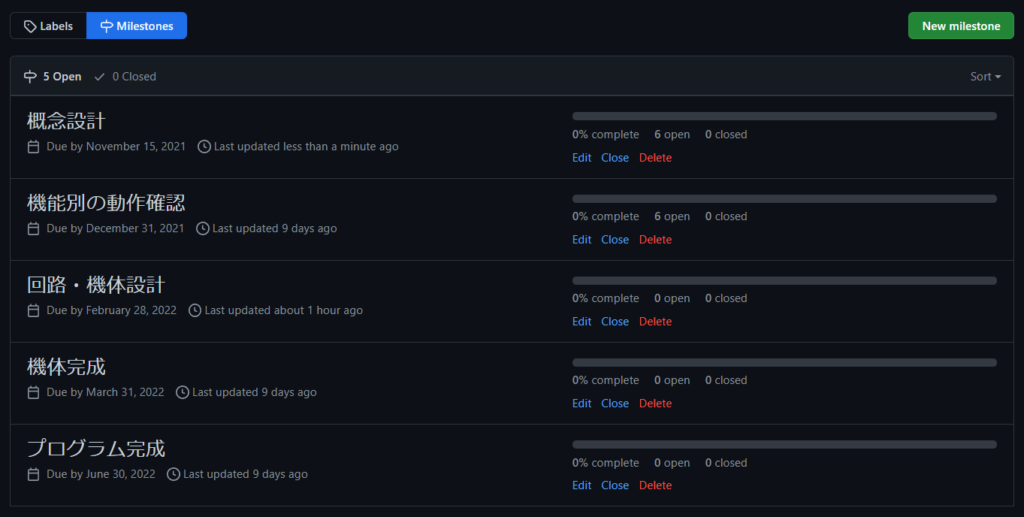
忘れっぽいのでGitHubリポジトリを作成してやりたいことをissueにします。GitHubを使ったタスク管理について個人ブログにまとめているのでよかったら見てください。
先ほどのスケジュールをマイルストーンとして登録しました。
Projectsを設定するとこんなふうにkanban表示ができたりします。


頑張ります
研修の時間は午前中の2~3時間くらいなのでちまちまと進めていくことになりそうです。こうしてブログを書いているうちに別の研修が入ってきたので早速スケジュールの見直しが必要かもしれません。別件も楽しそうですし、終わったらブログに書くのでお楽しみにしててください。