
搭載する部品ですが、まずはしっかり基礎からやるということで、クラシックマウスでよく使われる部品にします。コアな部品はアールティロボットショップで販売しています。
主要部品選定
モータに関してはFAULHABER製1717 3V版
モータ電源はリチウムポリマー2セルの7.4V(6?8.4V)を使用します。
詳細な計算は後ほど。

写真引用:アールティロボットショップ
壁距離センサに関しては、
赤外線センサのコーデンシ製ST-1KL3A
指向特性として角度が狭い特徴(向きを合わせた赤外線LEDの反射光のみ受け取りやすい)があります。

写真引用:アールティロボットショップ
赤外線LEDのOSRAM製SFH4550
こちらも指向特性として発光角度が狭く、壁の切れ目を通過するときの赤外線センサの値で綺麗にエッジが立つはずですので、車体位置補正が精度良くできると思われます。

写真引用:アールティロボットショップ
タイヤは、京商製MZW2-20
しっかり路面に食いついて?くれるようです。

写真引用:アールティロボットショップ
これらは、アールティロボットショップで在庫しているので、いつでも手に入ります。
ヨー軸ジャイロセンサとしては、TDK InvenSense社ICM-20602にしました。

画像引用:TDK InvenSense社
精度がよくSPI接続ができ値段が安め、在庫が他のセンサと比べて多かった(2021年5月現在、慣性センサ関連は軒並み市場枯渇状態)ので、こちらを選びました。
必要な能力としてはデータシートを見て、以下が理由としてあります。
- 16-bit ADCと高精度
- 最大±2000 dpsのワイドレンジまで選べる
- SPI接続による高速通信
- 3mm x 3mmとパッケージが小さい
- ライブラリがある(これは大きい)
- 3軸加速度センサがある(使いこなせないと思うけど)
モータドライバは、新製品のTexas Instruments社DRV8424Pにしました。

画像引用:Digi-key
選定理由としては、データシートに書かれている以下となります。
- 4.5?33Vの入力駆動電圧
- DCモータ2chの駆動が可能
- ピーク4A、定常2.5Aの出力電流
- 330mΩの低ON抵抗
- 4mm x 4mmとパッケージが小さい
出たばかりなので使ってみたかったのと、使い慣れるとマウス研修だけでなく他のプロジェクトでも使いまわせそうだなと思ったためです。
必要なモータ電流量ですが、前回の計算式を使ってみます。
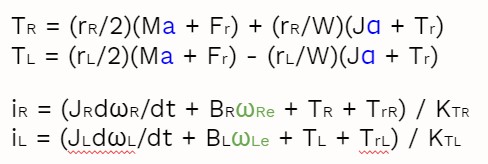
DCモータ1717 3Vを使ってパラメータとして以下の数値を入れていきます(製作済みなので検証かねて)。
車輪半径(rR、rL)=0.01225[m]
車体加速度a=9.81[m/s2]
車体重量m=0.131[kg]
車体角加速度α=0[rad/s2](ターン中は車体速度を一定速にするので)
車輪慣性(JR、JL)=4.39542×10-5[kg・m2]
摩擦トルク(TR、TL)=1.8×10-4[Nm]
トルク定数(TrR、TrL)=1.98x10-3[Nm/A] ? 5 (ギヤ比45:9?5)
粘性摩擦(ωRe、ωLe)=0[kgf?s/m2]
吸引システムを今回導入しないので、タイヤのグリップ力:F=μmgから、
タイヤと路面の摩擦係数μ=1.0以上にはならない → 最大車体加速度g=9.81[m/s]となります。
計算するとモータ1個あたり0.892A、合わせて1.78A必要となり、モータドライバのスペックを十分満たします。
吸引システムを持つ上位陣の加減速度は18?25m/s2程度だそうなので、2?2.5倍の電流が必要そうですが、そこは気にしないことにします。