
こんにちは!yasueです。
前回までは[Pi:Co Classic3]を使ってマイクロマウスについて勉強してきましたが、弊社の研修はあくまで自作マウスで全国完走することが目的です。
よって、今回からは自作マウス制作記として、新たにブログを書いていきたいと思いますので、よろしくお願いします!
まずは自作マウスのコンセプトを決めよう!!
半年間、いろいろな大会で皆さんのマウスを拝見して自作マウスの構想を練ってみました。
アールティの研修&初の自作マイクロマウスになるので、この機会に色々とお勉強をしようと思いコンセプトを下記としました!(全国大会後の打ち上げで決めましたw)
- ESP32を実装した、クラシック競技用マイクロマウスを作る
- 吸引マウス作りたい(吸引ファンの設計にこだわる!)
- MATLABを使えるようにする(デバッグし易いのは正義!)
- プログラミングのお勉強します(マウスに向かないって聞くけどMicroPython面白そう)
- 機械設計段階の作りこみを頑張る!(宇宙人の皆さんから大事だぞと聞いたので)
- 全国大会で完走できるスケジュールを計画して実行する!
自作マウスの仕様を決めよう!!
具体的な使用部品はまだまだ未定ですが、僕の自作マイクロマウスの仕様は下記となります。

- 機体名:Katzenkerl(カッツェンケール)
- クラシック競技用吸引マイクロマウス
- 基板:検討中(KICADで設計予定)
- マイコン:ESP-WROOM-32D [shop]?[datasheet]
- 壁センサ:発光ダイオード@検討中
- フォトトランジスタ@検討中
- ジャイロセンサ:未定(MPU-6050を予定してたけどディスコン・・・)
- エンコーダ:モータに付属
- モータ:駆動用@FAULHABER 1717T 006SR – 3V [shop] [datasheet]
- 吸引用@検討中(コアレスモータにする予定)
- モータドライバ:駆動用@検討中
- 吸引用@検討中
- 吸引ファン:設計中
- ギヤ:検討中
- タイヤ:検討中(ミニッツのタイヤがいい)
- バッテリー:検討中(LiPoを予定してるけど、まだまだ部品決まってない・・・)
- 重量:目標100?110g
- サイズ:未定
改めて文字に書き起こしてみると、なんにも決まってないですね・・・
年内に仕様は固めておきたいので、皆さんの機体データを参考にさせて頂こうと思います!
ちなみに、機体名はドイツ語で猫男って意味らしいです。
僕がよく使うハンドルネーム「にゃたろー」にちなんで決めましたw(ドイツ語ってだけで厨二感が凄い・・・)
こまけぇこたぁいいんだよ!!とりあえずLチカだっ!!
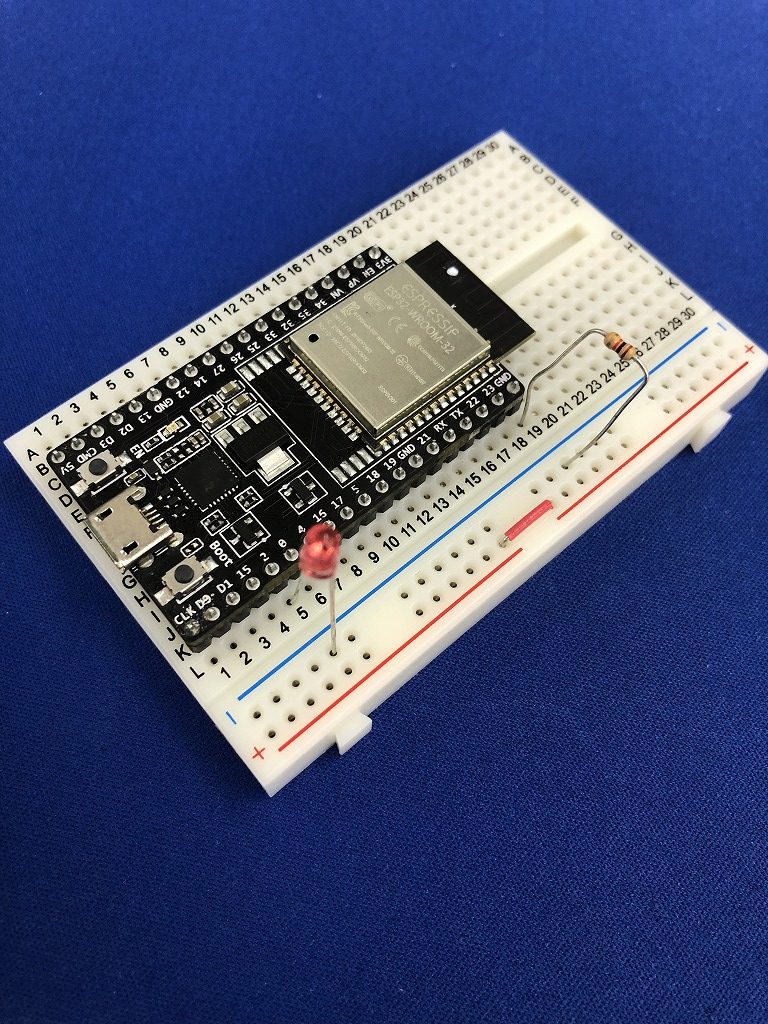
仕様決めはとりあえず置いといて、秋月電子さんで販売されている開発用ボード[ESP32-DevKitC]を使ってLチカをしました。
開発環境は、とりあえずVScode + PlatformIOとし、Arduino言語でコードをかいてます。
(参考:epiさんのPlatformIO IDE for VSCode でESP32のプログラム開発)
【ESP32-DevKitCを用いたLチカ】
ライブラリが用意されているので、コードは下記のように書くだけです。Lチカさせるのが凄い楽ですね・・・
<main.cpp>
#include Arduino.h
#define LEDPIN 2
void setup() {
// put your setup code here, to run once:
pinMode(LEDPIN, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(LEDPIN, HIGH);
delay(250);
digitalWrite(LEDPIN, LOW);
delay(250);
}
ただし、ライブラリをただ使うだけでは研修になりません。アールティ社員として、レジストリをどのように書き換えているのか、しっかり理解していきたいと思います。(コードの説明を書こうと思いましたが、すごくめんどくさい大変な作業だと気づいたので割愛します・・・)
次回までにやること
とりあえずLチカさせることはできたので、ジャイロ(試しにMPU-6050)からセンサ値を取得してみたいと思います!