
はじめに
どうも、倉澤ズズくんです。前回は機体のコンセプトを決定したので今回は実際に使用する部品を選定します。自分の機体の構成メモとして、各部品の販売ページのリンクも記載しています。

マイクロマウスの部品は主に以下の要素があります。 これらに対してそれぞれの構成を考えていきます。
- マイコン
- モータ + エンコーダ
- モータドライバ
- タイヤ
- 距離センサ
- ジャイロセンサ
吸引ファンについてはスペースだけ確保して100日後の目標の大会以降に考えることとしているので今回は除外します。
マイコン
- 選定理由
- 使用経験があるため
- FPUが搭載されているモデルのため
- 評価ボード
NUCLEOの基板から書き込みを簡単に出来るため
余談ですが、当マイコンが搭載された評価ボードのNucleoF446を大きめのロボットに使用したりもできます。私も以前に研究用ロボットに搭載していました。

NucleoF446を使用した自作制御ボード
モータ + エンコーダ
FAULHABER 1717T003SR-3V(エンコーダ付きモータ)
- 選定理由
- 磁気式エンコーダが予め取り付けられており、別途取り付ける手間が省け、ソフトウェアに集中できるため
- 幅広く実績のあるモータのため

FAULHABER 1717T006SR(RT ROBOT SHOP より引用)
モータドライバ
- 選定理由
- PWMのPHASE/ENABLEモードを備えており経験があるため扱いやすい
- 上位勢が良く使っている
- 2ch 1.5[A]でそこそこの出力
- 並列に接続すると3[A]も出る
タイヤ
ミニッツホイールの既成品ホイール+ゴム
-
これにスパーギアを取り付けて使う
-
選定理由
- 使用実績が高く上位層にも良く使われている
- 軽くて強度も高くクオリティが高い
- 予めゴムとセットなので選定しやすい

ミニッツホイールとゴム
スパーギア42枚歯(S50B42A-0208)?+?ピニオンギア13枚歯(ppkemoでの特注品)
- 選定理由
- ギアのモジュール値は0.5にしたいため
- マウスで主流である、もう一方のモジュール値0.3よりも耐久性に優れている
- 0.3よりもバックラッシの許容範囲が大きく、ギア同士の距離の精密性を減らせる
- 既成品のギアの入手性が良い
- 既成品がある(可能であれば、もっと軽い素材にはしておきたい)
- モータのシャフトがタイヤと干渉しない範囲で、スパーギアとピニオンギアの歯数を互いに素の関係とした上でマイクロマウスでよく使われるギア比の3-4にできる
- ギアのモジュール値は0.5にしたいため
距離センサ
オーソドックスな赤外線LED + フォトトランジスタで動作させます。
LEDを発光させ、壁に反射して帰ってくる光をフォトトランジスタでキャッチし、その光量で距離を判定します。
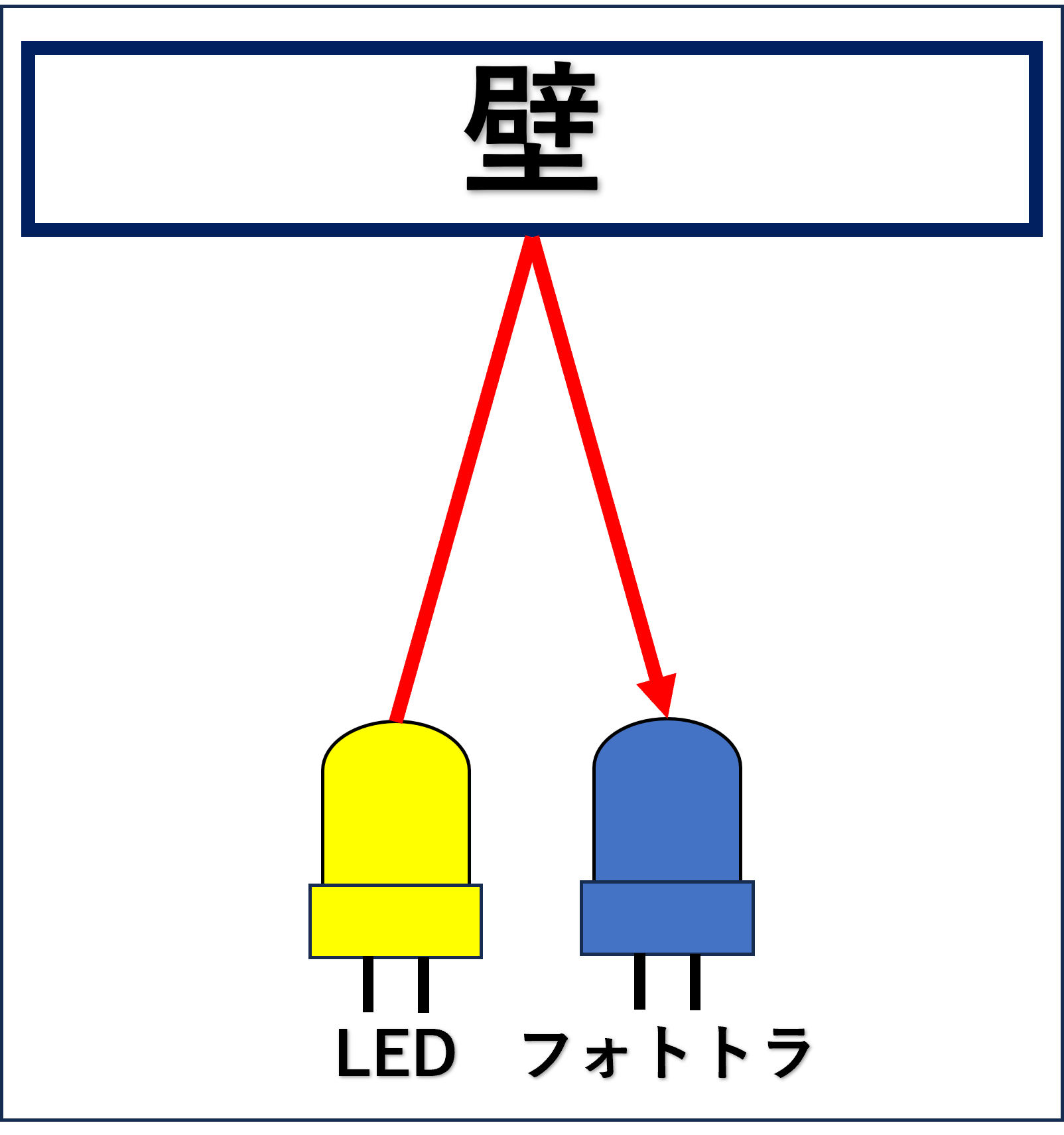
壁センサの仕組み
赤外線LED:SFH4550 + フォトトランジスタ:ST-1KL3A
- 選定理由
- クラッシック競技で実績のある部品のため
- 回路も先人の実績のあるタイプで組みます

SFH4550(RT ROBOT SHOP より引用)

ST-1KL3A
ジャイロセンサ
- 選定理由
- マイクロマウスで実績のあるセンサでは無いが、ジャイロセンサの代替品として選定
- 電子部品には生産終了等の理由で新規設計には非推奨となることがあり、マイクロマウスで実績のあるMPU60xxやICM-20xxxの系統ではいずれも非推奨となっていたため
- マイクロマウスで実績のあるセンサでは無いが、ジャイロセンサの代替品として選定
まとめ
これらの部品でマイクロマウスを製作します。
部品選定はブログ連載前より開始し1ヶ月の工期を見積もっていました。部品選定と同時に足周りの設計と距離センサのテストも行っており、おおよそ2.5週間と1週間ずつかかりました。
足周りに関して、先人の機体をじっくり見て意見を聞く期間を1週間程度、部品同士が干渉しないようにと部品の規格等を決定するのに1.5週間程度かかりました。ギア比やタイヤは人によって様々ですので特に苦労しました。距離センサは実績のある構成ではありますが、念の為に、実際のどのような波形が出るかを軽く確認して動作を確認していました(部品とは直接関係は無いが、開発環境の選定の一環としてのテストも兼ねていた)。他の部品は実績のある組み合わせだったため、残りの時間でスムーズに決まりました(ジャイロセンサは代替品ですが、社内に使用していた人達がいたため)。
また、部品を選定するにあたり、マイクロマウス合宿2023にも参加しました。ベテランの方々が丁寧に教えてくれるのでひたすら質問していました。設計や部品に悩んでいる方は次回以降のマイクロマウス合宿に是非参加してみてください!
先人達の部品についての意見を取り入れるのに時間がかかると思っていたので長めに取り、予定通り完了しました。これで開発が始められます!
次回は、距離センサについてブログを執筆します。