 ショウのマイクロマウス研修
ショウのマイクロマウス研修 ショウのマイクロマウス制作-Part17
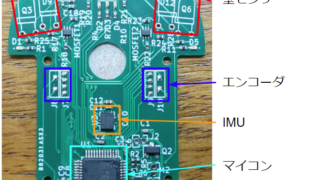
こんにちは、ショウです。前回部品選定をしたので今回から回路図を作成していきます。配置図とピン設定回路を作るにあたって最初に配線の取り回しが良くなるように大まかな部品配置とピン設定行います。実際に基板があるので基板に直接書きましたが、最初に基...
 ショウのマイクロマウス研修
ショウのマイクロマウス研修  ショウのマイクロマウス研修
ショウのマイクロマウス研修  ししかわのマウス研修
ししかわのマウス研修  マウス研修(しおたに) ショウのマイクロマウス研修
マウス研修(しおたに) ショウのマイクロマウス研修  キット製作研修
キット製作研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  ししかわのマウス研修
ししかわのマウス研修  PI:Co製作(宇野)
PI:Co製作(宇野)  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修