
追記(2021/02/12):最初に投稿したエントリー動画よりも、タイマーが見やすいように変更したものをアップロードしました!次回のブログで紹介します。
お久しぶりです、しゅうです。
今回は、大会も近いので本腰を入れて開発をしようと思いました!
でもなんと、今の僕が使っている開発環境と今まで使っていたコードの組み合わせではバグが発生することがわかりました。
迷路の探索中、袋小路でもないのにある2区画を行ったり来たりする無限ループに陥ってしまいます…
改めてコードを書いていけば、バグ回避はできそうですが、
それだととっても時間が取られてしまいます(泣)
ということで、macOSで開発するのはいったん中断して、元のCS+に戻すことにします。
統合開発環境ってやっぱりすごいんですねっ
開発環境を戻す
この作業だけでも時間が取られましたが、初期コストがかかるだけでした。
今回行ったことは以下の項目です。
- CS+と書き込み用ソフトのダウンロード
- RX631がUARTモードとなるように1ヶ所ショートさせていたので、そのハンダを取り除く
- こちらの記事でショートしていた、J4の19と20番ピンのこと
- GCC環境で書いたコードの一部をCS+環境に移植
あとは慣れればほぼいつも通りの開発ができています。
しかし、僕はMacでコーディングすることになれちゃっているため
Macの方で書いたコードを、USBメモリに入れて、WindowsマシンのCS+でビルドおよびPi:Coに書き込みをやっています。
もしかしたらWindowsの仮想環境を用意するといいかもしれませんね。
スラロームの調整
この記事で行っていたスラロームを、もっと綺麗に走れるように調整を頑張ってみました。先の記事にある通り、記事中の動画はかなりギリギリを攻めて走行していました。
なので大会に向けては、安定性を目指して調整を行なっていきます。
調整するときに意識するポイントとしては、2つあります。
- 曲がった後の角度
- 曲がる最中と後の移動距離
- 旋回中の直線距離
- 進入前後の直線距離
こちらの調整においては、モータの特製・タイヤのグリップ力・慣性などの影響により理想通りに追従はしてくれません。その上、要素が今までの調整時(直線走行や超信地旋回)よりも増えているのでかなり地道にパラメータ調整をしていかないといけません。そのため、1つずつ調整を行います。
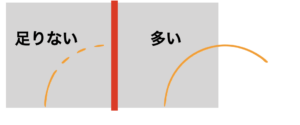
最初の、曲がった後の角度について。
こちらは、設定しているスラローム用にマウスが追従する円周の長さが影響してきます。理想的な計算をすると、クラシックサイズの1区画半(180 / 2)を半径とした4分円が円周になります。なので、まずはそれを設定して走らせてみます。下の図の左側のように足りなければ長さを増やし、右側のように多過ぎれば長さを減らしてくように調整します。
次に、曲がる最中と後の移動距離について。
ロボットがスラローム旋回に切り替わる際、左右のモータの速度を増減させます。その時、いきなり速度を変えてしまうと、モータが脱調してしまいガクガクした動きになってしまいます。そのため、速度を滑らかに変化させるための区間がある程度必要になります。この区間は長くは必要ありませんので、先に決め打ちで入れてしまっても良いです。最初に設定した円周の始まりと終わりの部分が少し直線になるイメージです。重要なのは次の「進入前後の直線距離」になります。
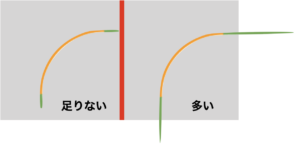
ロボットがぴったり1区画旋回するまでもう少しです。先の調整でスラロームはほとんどできていますが、1区画直進→左に曲がる→直進→・・・を続けていると、だんだんとずれていくことがあると思います。それは、設定したパラメータだけでは90度曲がりつつ1区画分ぴったり進めていないからです。下の図を参考にしてください。左側はその直進距離が足りない場合で、右側は多すぎる場合を図解しています。すなわちスラロームを開始直前と終える直後の直線距離を追加します。
調整の様子
かなり良い感じで調整作業が進んだので、2つのGIF画像を載せます。最初は直線とカーブが満遍なくある迷路、2つ目はカーブばっかりある迷路、となっております。
多少の誤差であれば、センサを使った軌道修正をして壁に衝突せずに走行してくれるので、このまま16×16の広い迷路でも同じように走ってくれるといいなと思っております。
(でも多分、その場でまた細かく調整をするような気はしますね・・・)
大会に向けて
2021/02/27に全国大会が開かれます!
今回はオンライン開催ということで事前に動画を撮影します。
その動画には以下の項目を含める必要があります(参考)。
- 簡単な自己紹介とロボットの紹介
- 走行の様子
- 走行時間内かつ挑戦回数内で行うこと
- スタート時とゴール時に計測装置を画面内に入れること(公式な物以外も可)
以上を1本の動画にして、YouTubeなどのウェブサイトに公開アップロードし、リンクをエントリー要項に書き込みます。
その期限が02/14なので気をつけたいですね。
エントリー用の動画はとりあえずはこちらになります♪
大会後に今後の研修の進め方や今までの総まとめのような記事を投稿する予定です。
それでは締め切りまでの残り数日、もう少し詰められるところを探して頑張って参ります!