 キット製作研修
キット製作研修 マイクロマウス研修(hara)その4
引き続きマイクロマウス研修をおこなっています。前回までは、Pi:Coのサンプルプログラムを自分なりに修正していき、5?5の迷路走行まではできるようになりました。次は、16?16のフル迷路での走行なのですが、結果からいうと設置場所の照明の関係で、壁を検出するための閾値の調整は必要でした。
 キット製作研修
キット製作研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  d-satoのマイクロマウス研修
d-satoのマイクロマウス研修 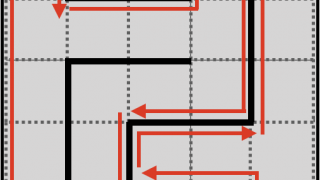 しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  d-satoのマイクロマウス研修
d-satoのマイクロマウス研修  マイクロマウス研修記(komi)
マイクロマウス研修記(komi)  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修 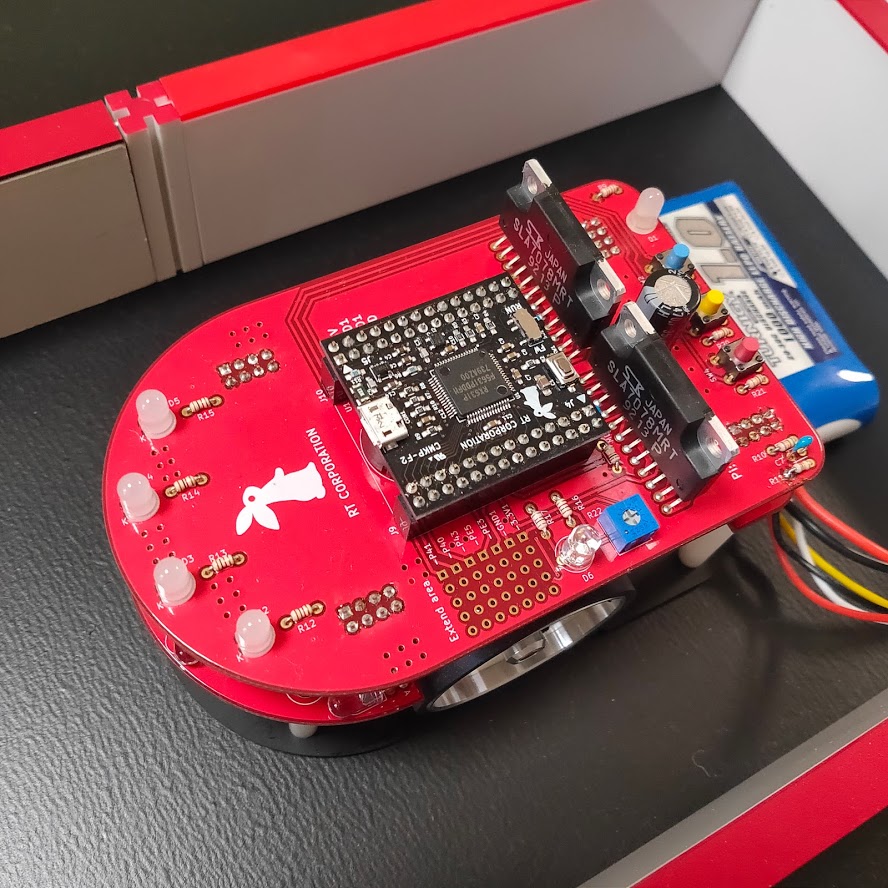 d-satoのマイクロマウス研修
d-satoのマイクロマウス研修