 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作 Isaac Lab Terrain(地形)設定 解説 ~CoRE用設定を添えて~ 4足歩行ロボット MEVIUS製作 Part.5
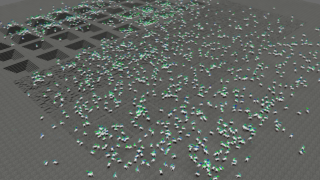
はじめに東京科学大学の福田です。現在チームMA-KINGにて、ロボット競技会CoREにおける4足歩行ロボット開発を行っています。本ブログでは、Isaac Labの地形生成機能に着目して以下の3点の紹介をします。 Isaac Labで提供され...
 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作 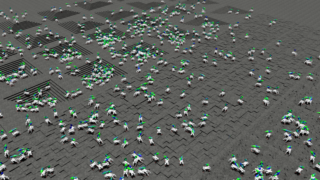 4足歩行ロボットMEVIUS製作
4足歩行ロボットMEVIUS製作