 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) 基板製造と実装サービスへの発注(PCBGOGO) ? 100日後に完走するマウス【371日目】 Part.16
はじめにこんにちは、倉澤ズズくんです。前回、基板再発注のためにPCBの修正をしました。今回は、基板と部品実装サービスを発注します。部品実装サービスとは部品実装サービスとは、文字通り基板上の部品のはんだ付けしてもらうサービスです。発注時のデー...
 100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん) 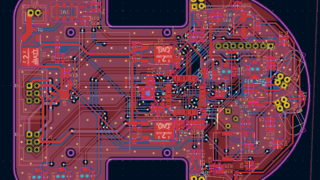 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修