

こんにちは、しおたにです。
この間紹介したスラローム時の前壁補正を進めていきます。

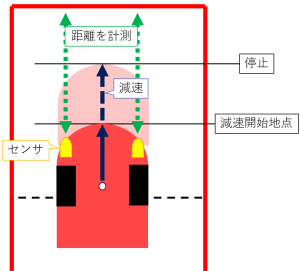
上図のようにスラローム前に前壁との距離を測り、スラローム開始地点を見極めます。
曲がる部分は出来ているので、前壁との距離を測るところを作っていきます。
効果を分かりやすくするため、前壁から一定距離で止まるようにしてみます。
やりたいこと
-
コードを書く
走行中に前方との距離を測るセンサを使用し、一定距離に達したら減速を始めるようにします。
コードはこれだけ
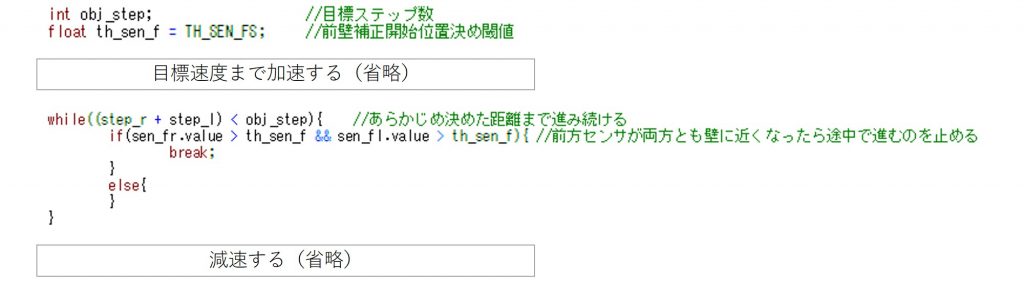
ここでは前壁に対して正対してある程度の速度で走行していると仮定しています。
センサ値は距離が近づくにつれ大きくなるので、減速を開始したい地点のセンサ値を閾値とし、それを超えたら進むのを止めるようにしました。 -
動かす
直線区間でスタート位置が変わっても同じ距離で止まるか試してみました。
↓スタート位置別の停止位置
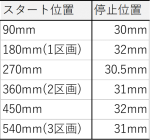
距離に関わらず壁からだいたい31mmで停止できていることが分かります。

これで前壁との距離をみれるようになりました!
今回はここまで。次回はスラロームと合体します。