

ししかわです。
研修の一環で、マイクロマウスを基板から自作します。
私のマウスはM5Stackの拡張モジュールとして作る予定ですが、「本体とモジュールの通信をどうするか」「モータやセンサをどのように制御するか」のイメージがまだ付いていません。そこで、学習のためにM5Stack公式のモジュールを分解して仕組みを観察しました。
今回分解したのはM5Balaという、2輪でバランスを取るロボットカーです。倒立振子ともいいます。

国内ではスイッチサイエンス等から購入できます。
マイクロマウスではありませんが、エンコーダ付きのDCモータやバッテリー等共通する部品も多いです。
公式ドキュメントにはモジュール内部の回路図等は見つかりませんでした。
実際に分解して使われている部品等を確認したいと思います。

M5Stack Fire(画像左)とM5Bala(画像右)
モジュール側にPOGOピンというバネ付きのピンが4本生えています。
本体とモジュール間はこの4ピンのみで繋がっていて、I2Cプロトコルで通信します。
本体上面や側面に空いている穴はLEGO TECHNIC互換になっています。
M5Stackのセンサユニット等、他の部品もこの穴が空いている物が多く、ブロックを使って自由に固定、拡張できます。
ではモジュールを分解していきます。
?モジュール下部のネジ4本を外します。

底部のネジ4本を外す
?モジュール本体とモータを繋ぐケーブルを外します。
画像のように、モータと車輪部分は別部品になっていました。
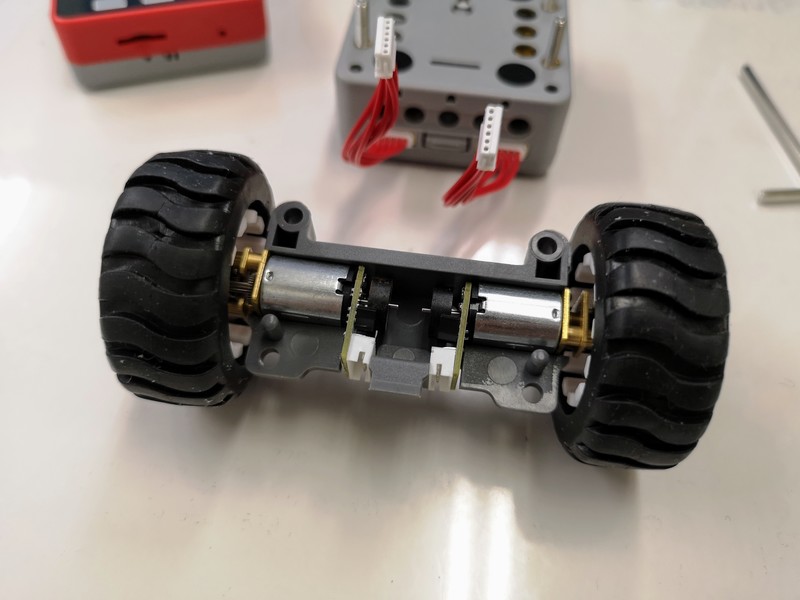
?左右のモータと車輪を取り出します。
モータの軸に磁石、その側面にエンコーダが2つ取り付けられています。モータはN-20という型番でした。
さらにモータとエンコーダのセットがAliExpressで販売されているのを見つけました。
この部分はM5Stackオリジナルではなく、この単位で流通していると思われます。

?続いてモジュール本体側です。六角レンチを使ってネジを4本外します。

基板が見えました。
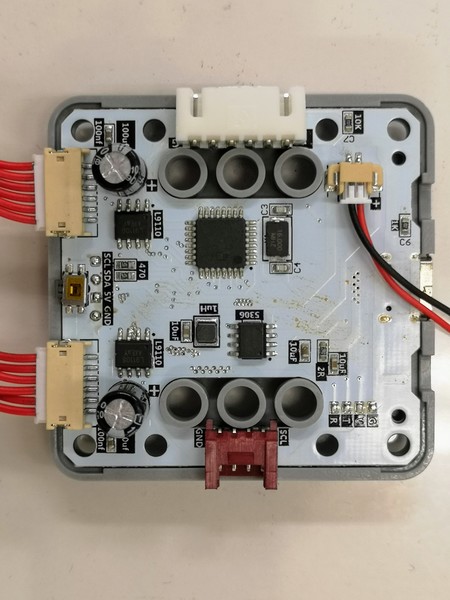
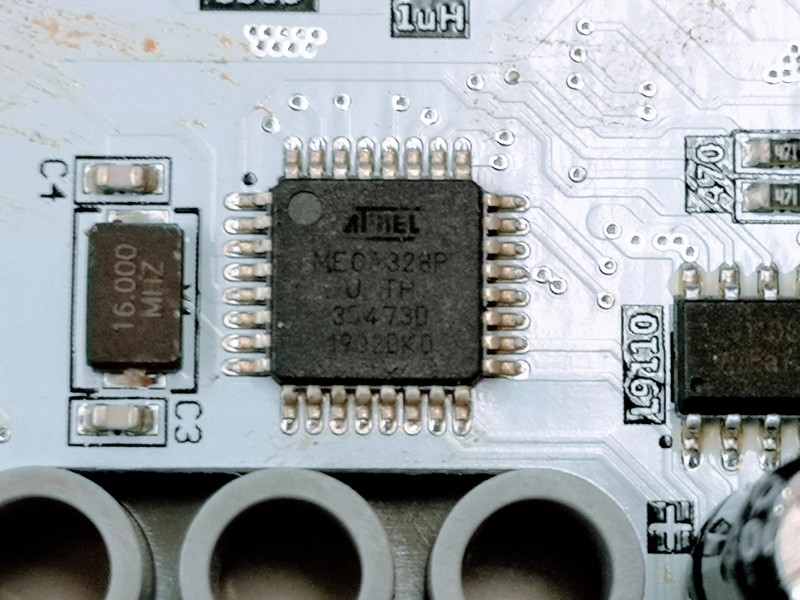
モジュールの基板側にマイコンが搭載されています。
Atmel社のATmega328Pというマイコンです。Arduinoでよく使われます。
基板側面の6ピンのコネクタを経由してファームウェアを書き込めるようになっています。
(ただし、ファームウェアのソースコードは公開されていませんでした)
そのほか、次の部品が使われていることを確認できました。
- モータドライバ:L9110?x2個
- 他のモータ搭載モジュールでも使われています(別記事で言及予定)
- バッテリー(550mAh@3.7V)
- バッテリー制御IC:IP5306
- M5Stack本体で使われているのと同じです(M5Stackの回路図参照)
- 16MHzのクリスタル:型番不明
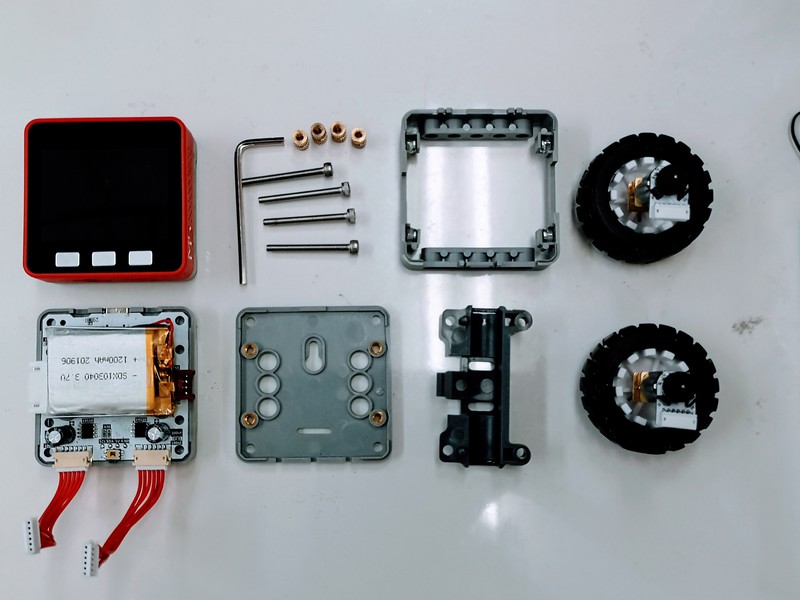
バラバラになったBala(この記事のハイライトです)
M5Balaを分解して基板を観察しました。
設計上、次の点が参考になりました。
- モジュール側にもマイコンを搭載し、M5Stackとは最小限のピンで接続している
- モータ駆動やセンサ通信処理をモジュール側に任せられる
- 基板にファームウェア書き込みのコネクタを搭載することで、組込後に開発ができる
- モータとエンコーダ部分を別部品としている
- 簡単に交換できる
- M5Stackや他のモジュールと同じ部品を使っている
- 部品やドライバプログラムの再利用ができる
特に「モジュール側にもマイコンを積んでモータやセンサとの制御を任せる」の部分は真似したいです。
(マイクロマウスでよく使われるSTM32を使いたいと考えています)。
以上です。