

こんにちは、しおたにです。
前回、最短走行で等速円運動スラロームを試し、信地旋回と比べ大幅にタイム短縮できました!
一見滑らかに曲がれているしこれで終了…とはいきません。
等速円スラローム中の角速度変化をグラフにすると下図のような感じになります。
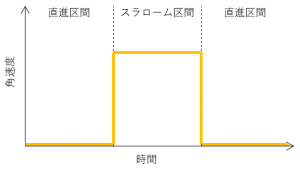
モータにへの速度指令はこんな感じです。
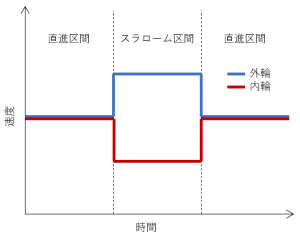
実際にはこの通りに速度変化はできません。摩擦や慣性が働いているからです。
身近な例でいえば自動車は止まった状態から急に100km/hで動くことは出来ません。
目標の速度めがけて徐々に加速するしかないのです。
角加速度変化をみるとこの通り
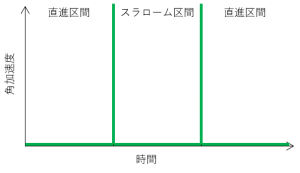
スラローム前後で一瞬無限大の入力(インパルスな入力)になっていることがわかります。
つまり現状ではモータに無理を強いて曲がっていることになります。
Pi:Coはステッピングモータを搭載していますので、急激に速度を変えると脱調します。
また、加速度が大きいためタイヤがスリップしやすく、走行経路の誤差が大きくなります。
これを解決するのが台形加速です(下図)。
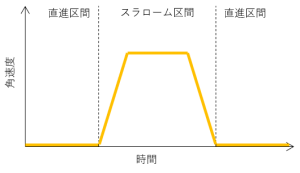
ご覧の通り角速度を台形状に変化させて加減速します。
時間をかけて加減速するため角加速度の変化も抑えられます。

モータへの速度指令はこんな感じです。

これで曲がれば今までより無理なく滑らず曲がれるはず…
今後はこの台形加速を使ったスラロームを試していきます。
今回はここまで。
そういえばスラローム、スラロームとよく言っていますがこれは蛇行走行など指す言葉で、正しくは緩旋回(かんせんかい)と言うそうですね。
マイクロマウス界隈ではスラロームのほうが伝わるみたいですので私はこのままいきます。
ではまた次回。