

こんにちは、しおたにです。
今回から走行プログラムの改良をやっていきます。
早速ですが、現状の曲がり方について
サンプルプログラムでは“超信地旋回”という曲がり方をしています。
図にすると↓のような感じ
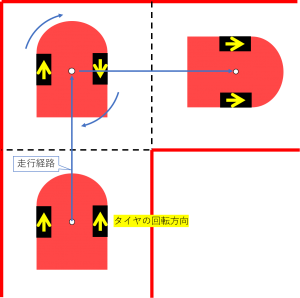
左右のタイヤを逆方向に回しその場で向きを変えています。
利点としては、
- ロボット本体がその場から動かないため、ズレが生じにくい
- プログラムが簡単
などが挙げられます。
しかし、
- 一旦停止する必要がある
- 交差点の中心まで進む必要があるため走行経路の無駄が多い
といった欠点があります。
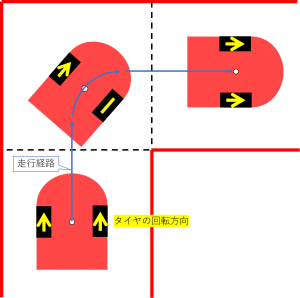
改善策としては“信地旋回”があります。
これは内側のタイヤのみを止める旋回方法です。
利点として、下の図のように走行経路がカーブを描くようになっていて超信地旋回よりも無駄が減っています。
動画で比較すると
超信地旋回 約9.4秒でゴール
信地旋回 約6.4秒でゴール
6×4の簡易迷路ですが3秒も縮まりました!
改良の効果が見えると嬉しいですね。
超信地旋回よりは信地旋回のほうが速いことがわかりましたが、まだ改良の余地はあります。
ではまた次回。